Peter Lobner, updated 18 July 2019
1. Phoenix
The Phoenix Unmanned Aerial Vehicle (UAV) is a small, autonomous airship designed to serve as a very long endurance, high-altitude “atmospheric satellite” that is capable of station keeping using an innovative variable buoyancy propulsion system. The UAV is intended for use in telecommunications and a range of other civil and military applications.
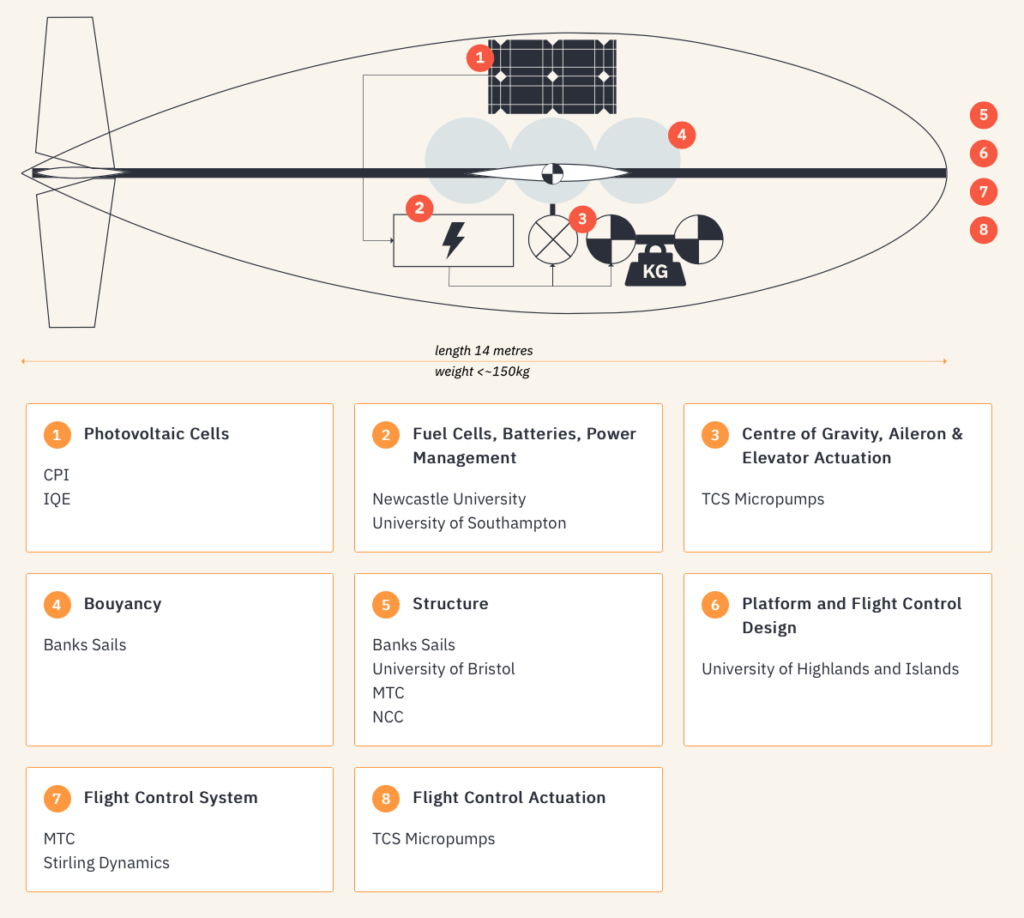
Phoenix development is being lead by a consortium of UK universities, businesses, and innovation centers, with a distribution of roles and responsibilities as shown in the following graphic.
This project runs for three years. It is one of several projects supported the UK’s Department for Business, Energy & Industrial Strategy (BEIS), through the Aerospace Technology Institute (ATI) and Innovate UK, to invest in “research and technology projects to deliver world leading aerospace technologies in the UK.”
The Phoenix project website is here: https://phoenixuas.co.uk
The Phoenix UAV is a small, variable buoyancy airship measuring 15 meters (49 feet) long, with a wingspan of 10.5 meters (34 feet). The UAV’s teardrop-shaped fuselage is constructed from a Vectran fabric, with short wings and a cruciform tail made of carbon fiber composite material. Thin film solar panels on the wing and horizontal stabilizer surfaces generate electric power for the UAV’s systems and to charge an onboard battery that provides continuous power at night and during inclement weather.


The fuselage contains 120 cubic meters (4,238 cubic feet) of helium lifting gas (hydrogen is an alternative), a supply of lifting gas, and a separate inflatable 6 cubic meter (212 cubic feet) cell containing heavier air. I would expect that the Phoenix is ballasted for near neutral buoyancy so that the control span of the buoyancy control system can produce both positive and negative buoyancy.
To increase buoyancy, air in the inflatable cell is released to the atmosphere via a vent in the tail. If needed, lifting gas can be released to the gas envelope to gain positive buoyancy. As the lighter-than-air Phoenix gains altitude, the aerodynamic surfaces generate forward momentum, propelling the UAV forward during the unpowered climb.
At the top of the climb, buoyancy is decreased by pumping outside air into the inflatable cell, increasing the gross weight of the UAV. As the now heavier-than-air Phoenix enters an unpowered dive, the aerodynamic surfaces continue generating forward momentum to propel the UAV.
During an extended mission, the climb-dive cycle is repeated as often as needed to provide propulsion for controlling the position of the UAV.

On 21 March 2019, the Phoenix UAV made its first successful flight indoors, covering about 120 meters (394 feet) and becoming the world’s first large variable buoyancy powered autonomous UAV. Outdoor tests will be conducted after the UK Civil Aviation Authority certifies the UAV. As currently configured the developers expect that Phoenix can operate at altitudes up to about 914 meters (3,000 feet).
You can watch a short video of the first flight here:
https://www.youtube.com/watch?v=jcqPvKfZjac
But was it the first ever flight of an airship using variable buoyancy propulsion?
No, it wasn’t. First there was Aereon in the 1860s and then there was AHAB in the early 2000s.
2. Aereon
Back in the 1860s, Dr. Solomon Andrews invented the directionally maneuverable, hydrogen-filled airship named Aereonthat used variable buoyancy and airflow around the airship’s gas envelope to provide propulsion without an engine. The gas envelope on the original Aereon airship consisted of three side-by-side, cigar-shaped balloons, each with seven internal cells containing the hydrogen lifting gas. The balloons formed a gas envelope measuring 80 feet (24.4 meters) long and 13 feet (4 meters) wide.
- Buoyancy of the airship was controlled by venting some hydrogen lift gas or dropping some sand ballast.
- The angle-of-attack (pitch angle) of the gas envelope was controlled by moving the center of gravity of the gondola (i.e., by moving people in the gondola fore and aft as needed)
- Propulsive force was generated by alternating between positive buoyancy (lighter-than-air) flight and negative buoyancy (heavier-than-air) flight, and by coordinating the pitch angle of the gas envelope.
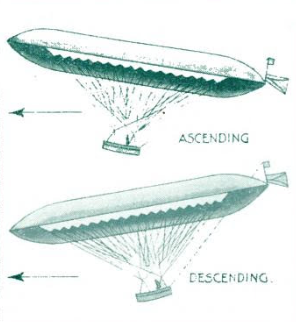
- During a buoyant ascent, the pitch angle was adjusted to as much as 15 degrees up. Air flow along the top surface of the envelope moved from bow to stern and drove the airship forward. The airship can continue to ascend until it reaches its “pressure altitude” where the decreasing atmospheric air density reduces airship buoyancy from positive to neutral.
- During a semi-buoyant descent, the pitch angle was adjusted to as much as 15 degrees down. Air flow along the bottom surface of the envelope moved from bow to stern and continued to drive the airship forward.
- Direction was controlled by a rudder at the stern of the airship
Andrews first flew Aereon over Perth Amboy, NJ on 1 June 1863 and flew at least three times more. With Aereon, he demonstrated the ability to fly in any direction, including against the wind, make broad 360 degree turns, and navigate back to and land at his starting point. Aereon’s gondola could carry the pilot and three passengers.
On 5 July 1864, the US Patent Office issued Patent # 43,449 to Solomon Andrews for his invention of a balloon that was capable of directed flight and could even be flown against the wind. You can read the patent here: https://patents.google.com/patent/US43449

Source: United States Library of Congress’s Prints and Photographs division,
digital ID cph.3b01438.
Andrews’ second airship, Aereon 2, had a different gas envelope design, described as “a flattened lemon, sharply pointed at both ends.” Aereon 2 also used a different approach for controlling buoyancy. The new approach used a complex set of ropes and pulleys to squeeze or release external pressure on the hydrogen gas bags, thereby changing their volume and how much air was being displaced. Aereon 2 flew over New York City on 25 May and 5 June 1866. The second trip ended up about 30 miles away with a landing in Oyster Bay, Long Island. This was Andrews’ last flight.
Andrews organized the Aerial Navigation Company, which was chartered in November 1865 for “the transportation of passengers, merchandise and other matter from place to place.” The firm intended to build commercial airships and establish regular airship service between New York and Philadelphia. During the post-Civil War economic crisis, many banks failed and Aerial Navigation Co. went bankrupt, ending the plans for the first commercial passenger and freight air service in the world.
3. Advanced High-Altitude Aerobody (AHAB)
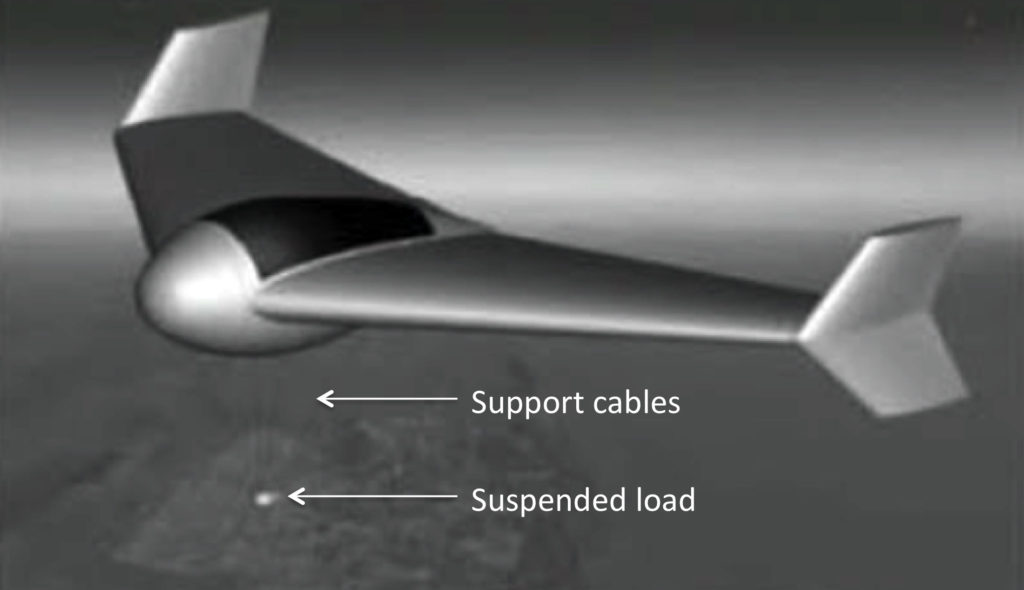
In the early 2000s, the Physical Science Lab at New Mexico State University was developing the Advanced High-Altitude Aerobody (AHAB), which consisted of a large, solar-powered, non-rigid, winged aerobody with the payload suspended below on several retractable cables. Changing the length of the cables moved the center of gravity and thereby controlled the attitude of the aerobody. Changing the buoyancy of the aerobody caused it to climb or descend. As with the Phoenix UAV and Solomon Andrews’ Aereon, a forward propulsive force was generated during each climb or descent maneuver. With this modest propulsion capability, AHAB was designed for station-keeping operations in near-space (very high altitude) where propellers would be ineffective.
In 2004, Mary Ann Stewart, et al., reported, “This superpressure balloon incorporates wing-like devices to give it a sleek aerodynamic shape. AHAB is designed to offset the effects of light winds by using a porpoising technique as necessary, trading altitude for horizontal motion. The craft is made up of a series of individual cells, and helium is pumped between cells to effect movement.”
Lt. Col Ed Tomme and Sigfred Dahl provided additional performance information, noting that such vehicles “will use a variety of unconventional buoyancy-modification schemes that allow vehicles to propel themselves by porpoising through the air at about 30 to 50 knots, enabling them to overcome all but the most unusual near-space winds.”
In the 1-14 July 2019 issue of Aviation Week & Space Technology magazine, former AHAB program manager, Mike Fisher, commenting on the new Phoenix UAV, provided the following historical insights on AHAB:
“The Aerobody was a solar-powered lighter-than-air vehicle (non-rigid rather than semi-rigid, as in the Phoenix) that pioneered the idea of using a ballonet to cause buoyancy and changes in center of gravity to enable propeller-less forward flight.
We took the concept far enough to demonstrate the validity of the underlying physics by building a subscale prototype that we successfully tested in indoor flight tests. Ultimately, the then-existing limits to photovoltaic cell and battery technology kept us from going past the prototype stage.”
What’s old is new again!
In the past two decades, winged underwater gliders implementing Andrews’ basic variable buoyance propulsion principle have been developed. See the 2001 article, “Autonomous Buoyancy-driven Underwater Gliders,” which you can read here:
https://pdfs.semanticscholar.org/8b21/111dee323c13a57079767b4973ce30bc6c24.pdf
Now, the UK Phoenix team has demonstrated variable buoyancy propulsion in a small, unmanned airship, 156 years after Solomon Andrews first flew the much larger Aereon with passengers in Perth Amboy, NJ, and almost two decades after the indoor test flight of the subscale AHAB prototype at New Mexico State University.
Best wishes to the UK Phoenix team in their efforts to develop an operational variable buoyancy propulsion system for a modern airship.
Additional resources on the Phoenix UAV
- Osborne, T. “Lung-Like Propulsion Drives British Long-Endurance UAV,” Aviation Week & Space Technology, April 2019; https://aviationweek.com/future-aerospace/lung-propulsion-drives-british-long-endurance-uav
Additional resources on Solomon Andrews and the Aereon
- Cooper, Iver P., “Airship Propulsion, Part Four: The Aereon,” Grantville Gazette, 14 October 2012; https://grantvillegazette.com/article/publish-541/
- Racine EAA Chapter 838 newsletter, Contact, Volume XXIV Issue 10, October 2013, pp 7 – 8, Sean’s Corner, “Aereon – 1864 to Today”; https://eaa838.org/wp-content/uploads/2013/03/EAA-Chapter-838-October-2013-Newsletter.pdf
- Whitman, Roger B., “He Flew an Airship Before the Wrights Were Born,” Popular Science Monthly, Vol 120, No. 1, pp 15 – 18, January 1932; https://books.google.com/books?id=3icDAAAAMBAJ&printsec=frontcover&rview=1&lr=#v=onepage&q&f=false
- Rare Pioneering Aviation Pamphlet, Aereon, Aerial Navigation Co, 1866; https://www.worthpoint.com/worthopedia/1866-pioneering-aviation-pamphlet-111762012
Additional resources on the Advanced High-Altitude Aerobody (AHAB)
- Lt Col Edward Tomme & D. Phil, “The Paradigm Shift to Effects-Based Space: Near-Space as a Combat Space Effects Enabler,” Airpower Research Institute, Research Paper 2005-01, 2005;http://www.au.af.mil/au/awc/awcgate/cadre/ari_2005-01.pdf
- Lt Col Edward Tomme & Col Sigfred Dahl, “Balloons for Today’s Military? An Introduction to Near-Space Concepts,” Air & Space Power Journal, Winter 2005, Volume XIX, No. 4, pp. 39 – 49; https://www.airuniversity.af.edu/Portals/10/ASPJ/journals/Volume-19_Issue-1-4/win05.pdf
- Mary Ann Stewart, Lt. Col. Kevin Frisbie & Gary Trinkle, “Geointelligence – High-Altitude Surveillance,” Global Aerospace Corporation, 1 July 2004; http://www.gaerospace.com/press-releases/pdfs/HighAltitudeSurveillance.pdf
Additional resources on buoyancy-driven airships
- Xiaotao Wu, “Modelling and control of an buoyancy driven airship,” Automatic Control Engineering, Ecole Centrale de Nantes (ECN); South China University of Technology, 2011; https://hal.archives-ouvertes.fr/tel-01146532/document
- Xiaotao Wu & Claude Moog, “Full model of a buoyancy-driven airship and its control in the vertical plane,” Aerospace Science and Technology, Volume 26, Issue 1, April–May 2013, Pages 138-152; available for a fee at: https://www.sciencedirect.com/science/article/pii/S1270963812000545