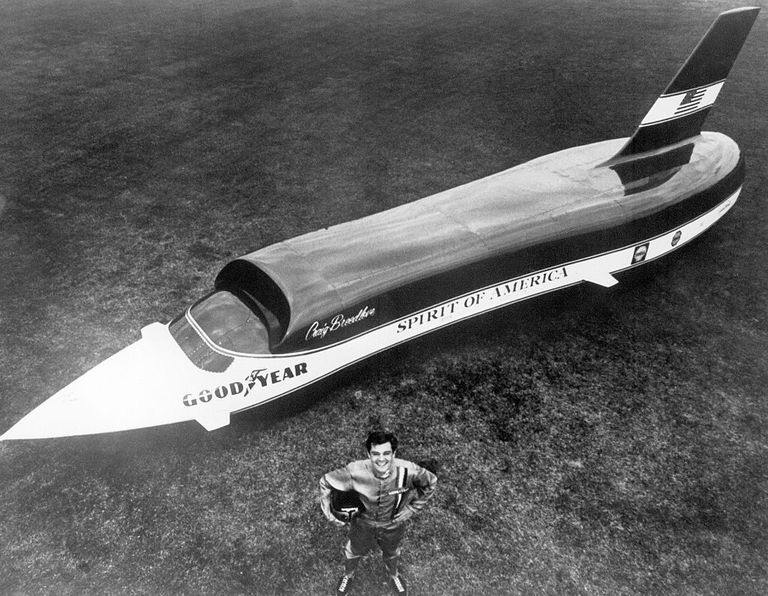
Craig Breedlove is best known as the first person to set land speed records above 400 mph (643.7 kph), 500 mph (804.7 kph) and 600 mph (965.6 kph) in the mid-1960s with his turbojet-powered Spirit of America and its successor, the Spirit of America Sonic 1. He later achieved a peak speed of 675 mph (1,086.3 mph) on a one-way run in his last land speed record car, the Spirit of America Sonic Arrow, in the 1990s.
The first two LSR cars were part of an intense duel from May 1963 to November 1965, primarily between Breedlove and Art Arfons, that resulted in a rapid and exciting increase of the land speed record, from John Cobb’s long-standing 16 September 1947 record of 394.196 mph (634.4 kph) in the piston-engine Railton Mobile Special, to Craig Breedlove’s 15 November 1965 record of 600.601 mph (966.6 kph) in the Spirit of America Sonic 1. In this two-and-a-half year period, there were 10 incrementally faster unofficial (not FIA certified) and official FIA land speed records. You’ll find a complete list of land speed record holders here: https://landspeedrecord.org/speed-records/
Needless to say, this was an exciting time that commanded attention to the latest news from the Bonneville salt flats.
Breedlove’s last LSR car, the Spirit of America Sonic Arrow, made its first test run on the Black Rock Desert in Gerlach, NV, on 28 October 1996. During the run, Breedlove reached a peak speed of about 675 mph (1,086 kph), but encountered higher-than-expected crosswinds that caused a dramatic high-speed U-turn that severely damaged the vehicle, which survived but was in need of significant repairs.
In 1997, the repaired Sonic Arrow experienced a series of mechanical problems during speed runs at Black Rock and program funding issues prevented Breedlove from completing another land speed record attempt.
Later in 1997, the British LSR team, which also was at Black Rock with driver Andy Green and their Thrust SSC LSR car, had a series of successful speed runs and they beat Breedlove to the milestones of setting land speed records greater than 700 mph (1,126.5 kph) and at supersonic speed (greater than 761.2 mph / 1,225 kph / Mach 1.0 at sea level at 15ºC/59ºF).
On 25 September 1997, Andy Green set a new land speed record of 714.144 mph (1149 kph / Mach 0.94), and less than a month later, set the first ever two-way supersonic land speed record at 763.035 mph (1,228 kph / Mach 1.02) on 15 October 1997. This record still stands in 2023.
After almost a decade without making another LSR run, Breedlove sold his Sonic Arrow in 2006 to adventurer Steve Fossett in 2006. Unfortunately, Fossett was killed in a September 2007 aircraft crash before being able to mount his own LSR challenge in his improved Sonic Arrow, which was rolled out in October 2007.
Craig Breedlove passed away on 4 April 2023, at the age of 86. He was an inspiration to me, and perhaps to many in my generation who shared an interest in the enormous challenges of raising the land speed record, and surviving to tell about it.
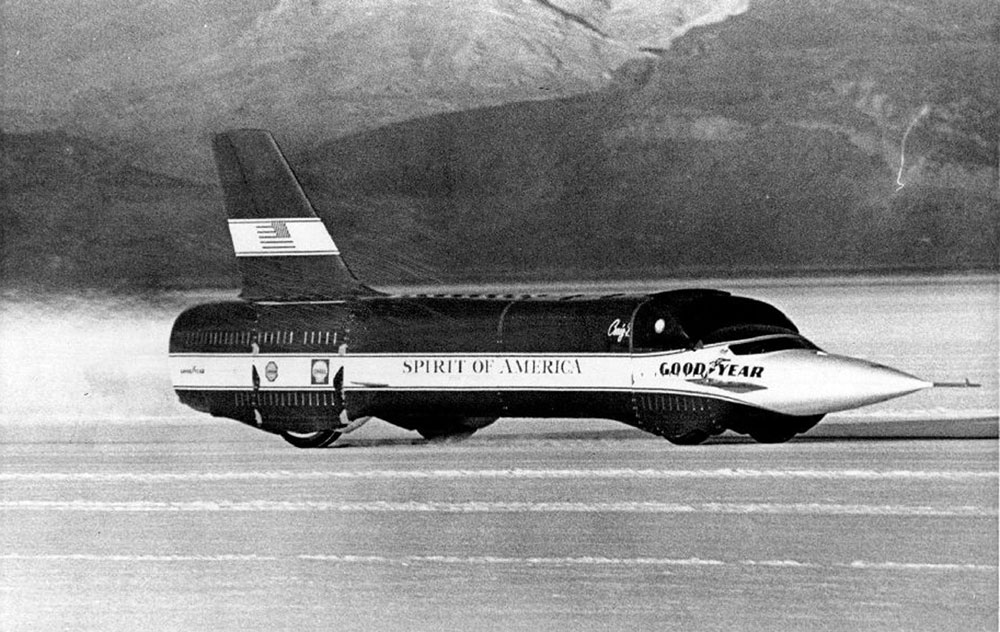
Craig Breedlove & the original Spirit of America set the first speed records above 400 mph on 5 August 1963 and 500 mph on 15 October 1964. Source: Sports Car DigestSpirit of America during a speed run at Bonneville. Source: The Drive With Alan TaylorCraig Breedlove & Spirit of America Sonic 1 set the first FIA-recognized speed record above 600 mph on 2 November 1965. Source: Getty via JalopnikSpirit of America Sonic 1 during a speed run at Bonneville. Source: Craig Breedlove via wbur.comCraig Breedlove & Spirit of America Sonic Arrow, circa 1996. Source: bluebird-electric.netSpirit of America Sonic Arrow during a test run on the Black Rock Desert on 28 October 1996. On this course, it reached a peak speed of 675 mph (1,086 kph). Source: AP/Eric Risberg via SFGateSteve Fossett’s 2007 update to the Sconic Arrow LSR car never made a challenge to the land speed record. Source: Screenshot from Scarf and Goggles video (2019)
Where are these LSR cars now?
Breedlove loaned the original Spirit of America to the Museum of Science and Industry in Chicago where it was on display from 1965 to 2015, when the museum returned the LSR car to Breedlove, but not before inflicting significant damage to the car. Breedlove said he intended to repair the LSR car. Howerver, its current whereabouts is not known.
The Spirit of America Sonic I vehicle currently is on display at Indianapolis Motor Speedway Hall of Fame Museum.
The Steve Fossett’s updated Spirit of America Sonic Arrow LSR car currently is on display in the Wings Over the Rockies Air & Space Museum in Denver.
Sam Hawley & Craig Breedlove, “Ultimate Speed: The Fast Life and Extreme Cars of Racing Legend Craig Breedlove,” Chicago Review Press, ISBN-13: 987-1641600200, 2 October 2018
Craig Breedlove, “Spirit of America;: Winning the world’s land speed record,” Henry Regnery Co, ASIN: B0006C2W4Y, 1 January 1971
Sam Hawley, “Speed Duel: The Inside Story of the Land Speed Record in the Sixties,” Firefly Books, ISBN-13: 978-1554076338, 16 September 2010
Videos
“Spirit Of America Sonic Arrow (Formula Shell LSRV) – Craig Breedlove’s Supersonic Challenger,” (13:17 min), posted on YouTube by Scarf and Goggles, 10 August 2019: https://www.youtube.com/watch?v=tvdAw8dJ9cU
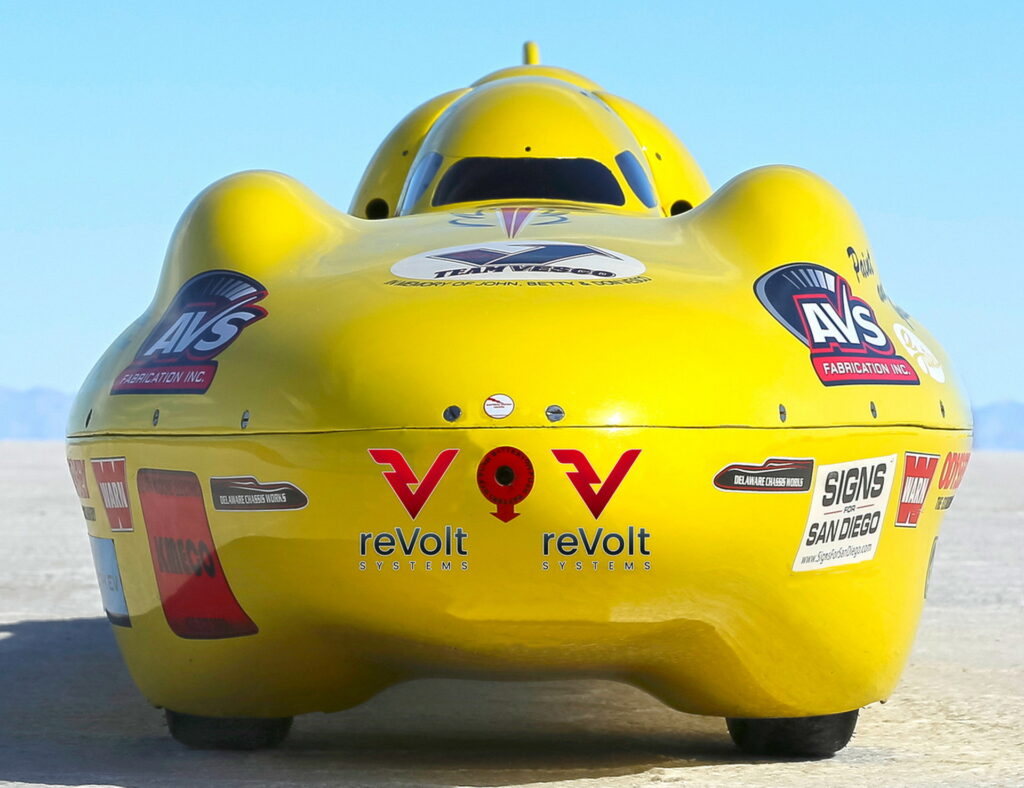
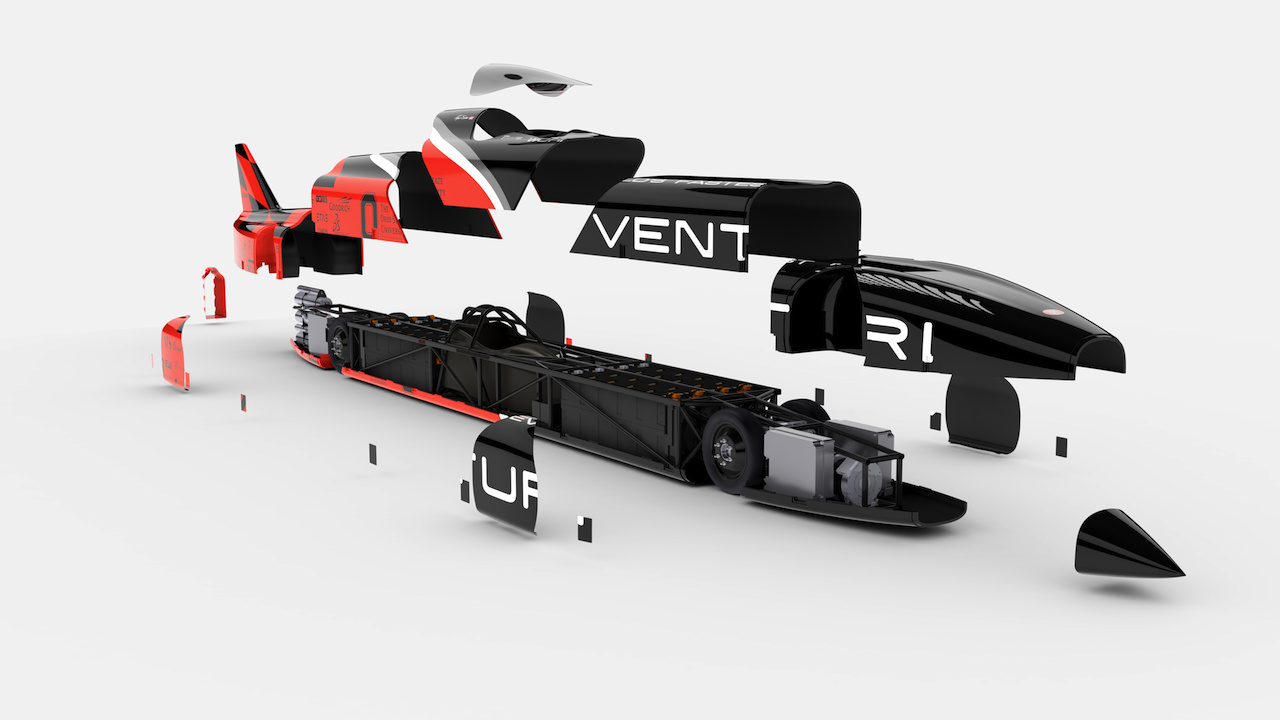
That FIA two-way world speed record still stands, but on 1 October 2021, the Team Vesco 444 reVolt Systems streamliner, Little Giant, set a faster US national electric vehicle Class E3 record at 353.870 mph (569.499 kph) driven by Eric Ritter. This is a US national record because the team was not able to recharge to Little Giant’s batteries fast enough to enable it to make the return runs within the 60 minute time limit set by the FIA for world records. The highest recorded speed of the Little Giant on the four runs was 357.0 mph (574.5 kph).
Little Giant electric LSR car and the team members at the 2021 Bonneville Speed Week. Source: Team Vesco via WonderfulEngineering
Two views of the narrow, streamlined, all-electric incarnation of the veteran LSR car Little Giant. Source, both photos: Team Vesco
The Little Giant was powered by two highly modified Tesla electric motors and 1,152 prismatic (not cylindrical) lithium-ion battery cells. Engine power and battery rating were not revealed. As a point of comparison, the VBB-3’s battery was rated at 2 MW.
Little Giant electric LSR car with the upper body panel removed. Source: Team Vesco
Little Giant is a veteran streamliner that made its debut at the 1957 Bonneville Speed Week, where it reached a speed of 169 mph and received the “Best Engineered Car of the Year” award. Over the years, it has been rebuilt several times. Through 2020, Little Giant was powered by a variety of piston engines. You’ll find more history on this car here: https://www.teamvesco.com/history.html
Well done to the Team Vesco 444 reVolt Systems efforts to raise the electric car land speed record!
I’ve reported previously on the Bloodhound LSR (land speed record) car in 2015, 2017, and lastly in 2019 when driver Andy Green made a series of high-speed test runs on the Hakskeen Pan in the Kalahari Desert in South Africa. On 17 November 2019, he achieved a top speed run at 628 mph (1,010 kph). The primary goal of the 2019 test campaign was to validate vehicle design and operation during high-speed runs up to 621 mph (1,000 kph). To that, the team responded, “Mission accomplished.” You can read my post on the Bloodhound LSR’s 2019 campaign here: https://lynceans.org/all-posts/land-speed-record-lows-and-highs-in-2019/
The 2019 test runs also were intended to provide an opportunity to fine-tune Bloodhound LSR before attempting a world land speed record run in 2020. However, lack of funds in 2020 deferred installing the Nammo rocket engine needed for the land speed record attempt. The worldwide COVID pandemic further intervened, cancelling a record attempt in 2020 and 2021.
The owner, Ian Warhurst, who had previously rescued the Bloodhound LSR from insolvency and then funded the 2019 high-speed tests, put the vehicle up for sale in January 2021. On 17 May 2021, the Bloodhound LSR team and the Coventry Transport Museum in Coventry, UK, announced the Bloodhound LSR jet car had moved into a new home in the museum where it is now on public display as part of the Biffa Award Land Speed Record Exhibition.
The Bloodhound LSR team reported, “….the sponsorship team are busy raising the funding required to attempt a new world land speed record, with a speed above 800mph. Once the required funding and investment has been raised, Bloodhound will leave the museum and be prepared for the record-breaking campaign.”
Bloodhound LSR on display at the Coventry Transport Museum Source: Bloodhound LSR
In the Biffa Award Land Speed Record Exhibition at the Coventry Transport Museum, Bloodhound LSR joins two UK world land speed record holders: Thrust2 and ThrustSSC.
On 4 October 1983, Richard Noble drove the Thrust2 to a world land speed record two-way average speed of 633.468 mph (1,019.468 kph) in the Black Rock Desert in Nevada, USA.
Thrust2 on display at the Coventry Transport Museum. Source: AJB83 at English Wikipedia
On 15 October 1997, Andy Green drove the ThrustSSC to a new land speed record and broke the sound barrier with a speed of 763mph (Mach 1.020, 1,228 kph) in the Black Rock Desert. This occurred 50 years after Captain “Chuck” Yeager, flying the Bell X-1 rocket-powered aircraft, made the first supersonic flight on 14 October 1947.
ThrustSSC on display at the Coventry Transport Museum Source: CTM via Vauxford (CC BY-SA 4.0)
A year ago, this might have seemed like a foolish question. An autonomous car racing in the Indianapolis 500 Mile Race? Ha! When pigs fly!
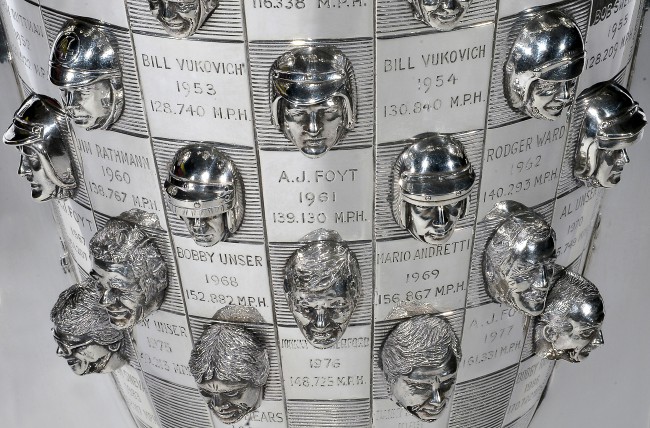
The Indy 500 Borg Warner Trophy. Source: The359 – Flickr via Wikipedia
One of the first things you may notice about the Borg Warner Trophy is that the winning driver of each Indy 500 Race is commemorated with a small portrait/sculpture of their face in bas-relief along with a small plaque with their name, winning year and winning average speed. Today, 105 faces grace the trophy.
Borg Warner Trophy close-up. Source: WISH-TV, Indianapolis, March 2016
The Indianapolis Motor Speedway (IMS) website provides the following details:
“The last driver to have his likeness placed on the original trophy was Bobby Rahal in 1986, as all the squares had been filled. A new base was added in 1987, and it was filled to capacity following Gil de Ferran’s victory in 2003. For 2004, Borg-Warner commissioned a new base that will not be filled to capacity until 2034.”
On 11 January 2021, the Indianapolis Motor Speedway along with Energy Systems network announced the Indy Autonomous Challenge (IAC), with the inaugural race taking place at the IMS on 23 October of 2021. The goal of the IAC is to create the fastest autonomous race car that can complete a head-to-head 50 mile (80.5 km) race at IMS. The challenge, which offers $1.5 million in prize money, is geared towards college and university teams. The IAC website is here: https://www.indyautonomouschallenge.com
The IAC organizers state that this challenge was “inspired and advised by innovators who competed in the Defense Advanced Research Projects Agency (DARPA) Grand Challenge, which put forth a $1 million award in 2004 that created the modern automated vehicle industry.”
All teams will be racing an open-wheel, automated Dallara IL-15 race car that appears, at first glance, quite similar to conventional (piloted) 210 mph Dallara race cars used in the Indy Lights race series. However, the IL-15 has been modified with hardware and controls to enable automation. The automation systems include an advanced set of sensors (radar, lidar, optical cameras) and computers. Each completed race car has a value of more than $1 million. The teams will focus primarily on writing the software that will process the sensor data and drive the cars. When fully configured for the race, the IAC Dallara IL-15 will be the world’s fastest autonomous automotive vehicle.
Rendering of the autonomous Dallara IL-15. Source: IACRendering of the autonomous Dallara IL-15 on the IMS race track. Source: IAC
Originally, 39 university teams from 11 counties and 14 states had applied to compete in the IAC. As of mid-January 2021, the IAC website lists 24 teams still actively seeking to qualify for the race.
The race winner will be the first team whose car crosses the finish line after a 20-lap (50 mile / 80.5 km) head-to-head race that is completed in less than 25 minutes. This requires an average lap speed of at least 120 mph (193 kph) and an average lap time of less than 75 seconds around the 2.5 mile (4 km) IMS race track.
In comparison, Indy Light races at IMS from 2003 to 2019 have had an average winning speed of 148.1 mph (238.3 kph) and an average winning lap time of 60.8 seconds. All of these races were run with cars using a Dallara chassis. The highest winning average speed for an Indy Lights race at IMS was in 2018, when Colton Herta won in a Dallara-Mazda at an average speed of 195.0 mph (313.8 kph) and an average lap time of 46.1 seconds, with no cautions during the race.
The winning team will receive a prize of $1 million, with the second and third place teams receiving $250,000 and $50,000, respectively.
The IAC race will be held more than 17 years after the first of three DARPA Grand Challenge autonomous vehicle competitions that were instrumental in building the technical foundation and developing broad-based technical competencies related to autonomous vehicles. A quick look at these DARPA Grand Challenge races may help put the upcoming IAC race in perspective.
The first DARPA Grand Challenge autonomous vehicle race was held on 13 March 2004. From an initial field of 106 applicants, DARPA selected 25 finalists. After a series of pre-race trials, 15 teams qualified their vehicles for the race. The “race course” was a 140 mile (225 km) off-road route designated by GPS waypoints through the Mojave Desert, from Barstow, CA to Primm, NV. You might remember that no vehicles completed the course and there was no winner of the $1 million prize. The vehicle that went furthest was the Carnegie Mellon Sandstorm, a modified Humvee sponsored by SAIC, Boeing and others. Sandstorm broke down after completing 7.36 miles (11.84 km), just 5% of the course.
A second Grand Challenge race was held 18 months later, on 8 October 2005. DARPA raised the prize money to $2 million for this 132 mile (212 km) off-road race. From an original field of 197 applicants, 23 teams qualified to have their vehicles on the starting line for the race. In the end, five teams finished the course, four of them in under the 10-hour limit. Stanford University’s Stanley was the overall winner. All but one of the 23 finalist teams traveled farther than the best vehicle in 2004. This was a pretty remarkable improvement in autonomous vehicle performance in just 18 months.
In 2007, DARPA sponsored a different type of autonomous vehicle competition, the Urban Challenge. DARPA describes this competition as follows:
“This event required teams to build an autonomous vehicle capable of driving in traffic, performing complex maneuvers such as merging, passing, parking, and negotiating intersections. As the day wore on, it became apparent to all that this race was going to have finishers. At 1:43 pm, “Boss”, the entry of the Carnegie Mellon Team, Tartan Racing, crossed the finish line first with a run time of just over four hours. Nineteen minutes later, Stanford University’s entry, “Junior,” crossed the finish line. It was a scene that would be repeated four more times as six robotic vehicles eventually crossed the finish line, an astounding feat for the teams and proving to the world that autonomous urban driving could become a reality. This event was groundbreaking as the first time autonomous vehicles have interacted with both manned and unmanned vehicle traffic in an urban environment.”
In January 2021, a production Tesla Model 3 with the new Full Self-Driving (FSD) Beta software package drove from San Francisco to Los Angeles with almost no human intervention. I wonder how that Tesla Model 3 would have performed on the 2007 DARPA Urban Challenge. You can read more about the SF – LA FSD trip at the following link: https://interestingengineering.com/tesla-full-self-driving-successfully-takes-model-3-from-sf-to-la
We’ve seen remarkable advances in the development of autonomous vehicles in the 17 years since the 2004 DARPA Grand Challenge race. Is it unreasonable to think that an autonomous race car will become competitive with a piloted Indy race car during the next decade and compete in the Indy 500 before they run out of space on the Borg Warner Trophy in 2034? If the autonomous racer wins the Indy 500, what will they put on the trophy to commemorate the victory? A silver bas-relief of a microchip?
On a 2016 road trip to the Black Hills, I had long transit days each way on Interstate 90 through southern Minnesota and South Dakota. One thing I noticed was that many of the heavy tractor-trailers on this high speed route were modern, streamlined vehicles that used a variety of aerodynamic devices that appeared useful for reducing aerodynamic drag and fuel consumption.
These tractor-trailers are Class 8 heavy trucks with a gross vehicle weight (GVW) of greater than 33,000 pounds (14,969 kg). The maximum GVW is set on a case-by-case basis using the Federal Bridge Formula Weights published by the Department of Transportation’s (DOT) Federal Highway Administration (FHWA) at the following link: https://ops.fhwa.dot.gov/freight/publications/brdg_frm_wghts/index.htm
For example, a long 5-axle tractor-trailer, commonly called an “18-wheeler,” can have a GVW up to 85,500 pounds (38,782 kg), but it is limited to a maximum GVW of 80,000 pounds (36,287 kg) when operating on federal interstate highways. The higher weight limit may apply on other roads if permitted by state and local jurisdictions.
Class 8 Trucks make up only 4% of the vehicles on the road. However, they use about 20% of the nation’s transportation fuel. The following Department of Energy (DOE) video, entitled “Energy 101: Heavy Duty Vehicle Efficiency,” provides an introduction to what’s being done to introduce a variety of new technologies that will improve the performance and economy of Class 8 tractor-trailers while reducing their environmental impact: https://www.energy.gov/eere/videos/energy-101-heavy-duty-vehicle-efficiency
In this post, we’ll take a look at the following:
Three US and Canadian programs to improve tractor-trailer aerodynamics, fuel efficiency and freight efficiency:
US Environmental Protection Agency (EPA) SmartWay® Transport Partnership
Canadian Center for Surface Transportation Technology
US Department of Energy (DOE) SuperTruck program
The North American Council for Freight Efficiency’s (NACFE) Annual Fleet Fuel Study for 2019, which provides insights into the current state of the US Class 8 tractor-trailer fleet.
Accessories available to improve the aerodynamic efficiency of existing Class 8 tractor-trailers.
Aerodynamic Class 8 tractor-trailers from major US manufacturers, including:
Manufacturer’s flagship Class 8 trucks
Test trucks developed for the DOE SuperTruck program
Other advanced Class 8 truck designs and test trucks that are demonstrating new freight vehicle technologies.
Electric-powered Class 8 trucks that are about to enter service with the potential to revolutionize the freight trucking industry.
In the body of this post are links to 12 individual articles I’ve written on advanced Class 8 trucks, each of which can be downloaded as a pdf file. You’ll also find many other links to useful external resources.
2. US and Canadian programs to improve tractor-trailer aerodynamics and freight efficiency
Freight transportation is a cornerstone of the U.S. economy. In 2012, U.S. businesses spent $1 trillion to move $12 trillion worth of goods (8.5% of GDP). However, freight accounts for 9% of all U.S. greenhouse gas (GHG) emissions, and trucking is the dominant mode. The following programs are focused on reducing the GHG emissions of the freight trucking industry.
2.1 US SmartWay® Transport Partnership
The trucking industry’s ongoing efforts to improve heavy freight vehicle performance and economics were aided in 2004 by the creation of the SmartWay® Transport Partnership, which is administered by the Environmental Protection Agency (EPA). SmartWay® is a voluntarily program for achieving improved fuel efficiency and reducing the environmental impacts from freight transport. The goal is, “to move more freight, more miles, with lower emissions and less energy.” The SmartWay® website is at the following link: https://www.epa.gov/smartway
SmartWay® is promoting the following strategies to help the heavy trucking industry meet this goal:
Idle reduction
Speed control
Driver training
Aerodynamics
Tire technologies
Lubricants
Hybrid power trains
Improved freight logistics
Vehicle weight reduction
Intermodal freight capability
Alternative fuels
Long combination vehicles (LVCs, such as double trailers)
A truck and trailer fitted out with all the essential efficiency features can be sold as a SmartWay® “designated” model. A “designated” tractor-trailer combo can be as much as 20% more fuel-efficient than the comparable standard model.
2.2 Canadian Center for Surface Transportation Technology
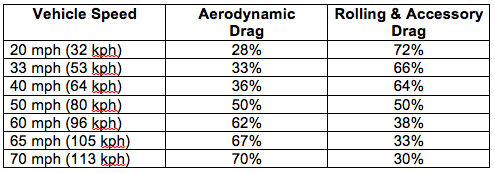
In May 2012, the Canadian Center for Surface Transportation Technology (CSTT) issued technical report CSTT-HVC-TR-205, entitled, “Review of Aerodynamic Drag Reduction Devices for Heavy Trucks and Buses.” In Table 2 of this report, CSTT provides the following table showing the relative power consumption of aerodynamic drag and rolling / accessory drag as a function of vehicle speed for a representative heavy truck on a zero grade road with properly inflated tires. Results will be different for streamlined trucks that have already have taken steps to reduce aero drag.
Relative magnitude of drag components. Source: CSTT, 2012
In this example, rolling / accessory drag dominates at lower speeds typical of urban driving. At 50 mph (80 kph) aerodynamic drag and rolling / accessory drag are approximately equal. At higher speeds, aerodynamic drag dominates power consumption. The speed limit on I-90 in South Dakota typically is 80 mph (129 kph). At this speed the aero drag contribution is even higher than shown in the above table.
Key points from this CSTT report include the following:
For tractor-trailers, pressure drag is the dominant component of vehicle drag, due primarily to the large surface area facing the main flow direction and the large, low-pressure wake resulting from the bluntness of the back end of the vehicle.
Aero-tractor models can reduce pressure drag by about 30% over the boxy classic style tractor.
Friction drag occurring along the sides and top of tractor-trailers makes only a small contribution to total drag (10% or less), so these areas are not strong candidates for drag-reduction.
The gap between the tractor and the trailer has a significant effect on total drag, particularly if the gap is large. Eliminating the gap entirely could reduce total drag by about 7%.
Side skirts or underbody boxes prevent airflow from entering the under-trailer region. These types of aero devices could reduce drag by 10 – 15%.
Wind-tunnel and road tests have demonstrated that a “boat tail” with a length of 24 – 32 inches (61 – 81 cm) is optimal for reducing drag due to the turbulent low-pressure region behind the trailer.
Adding a second trailer to form a long combination vehicle (LCV), and thus doubling the freight volumetric capacity, results in a very modest increase in drag coefficient (as low as about 10%) when compared to a single trailer vehicle.
In cold Canadian climates, the aerodynamic drag in winter can be nearly 20% greater than at standard conditions, due to the ambient air density. For highway tractor-trailers, this results in about a 10% increase in fuel consumption from aerodynamic drag when compared to the reference temperature, further emphasizing the importance of aerodynamic drag reduction strategies for the Canadian climate.
SuperTruck is major DOE technology innovation program with many industry partners representing a broad segment of the US industrial base for heavy tractor-trailers. This program, run by DOE’s Vehicle Technologies Office, focused on Class 8 trucks with internal combustion engines during the first two five-year program phases known as SuperTruck 1 and 2. Program focus shifted to electric powertrains in the third five-year phase known as SuperTruck 3.
Following is an overview of the SuperTruck program. Additional sources of information are listed at the end of this post.
SuperTruck 1 (2010-2016)
The first phase, known as SuperTruck 1, was a $284 million public-private partnership in which industry matched federal grants dollar-for-dollar. Four Class 8 truck manufacturers led teams in the SuperTruck 1 program:
Freightliner (Daimler North America)
International (Navistar)
Peterbilt (teamed with Cummins)
Volvo North America
DOE SuperTruck 1 teams. Source: DOE
Objectives for the DOE SuperTruck 1 program were:
Demonstrate a 50% freight efficiency improvement from a “baseline” 2009 model year Class 8 tractor-trailer.
Freight efficiency is the product of payload weight (in tons) and fuel economy (in miles per gallon), with results reported in North America as ton-miles per gallon.
Performance would be measured with a demonstration SuperTruck operated at 65,000 pounds GVW.
Average fuel efficiency of the baseline tractors in SuperTruck 1 was 6.2 mpg.
Improve engine efficiency by 8% to achieve 50% brake thermal efficiency (BTE), and thereby boost fuel efficiency by 16%.
The BTE of an engine is the ratio of Brake Power (BP) to Fuel Power (FP).
Brake power (BP) is the amount of power available at the crankshaft, taking into account engine friction losses (i.e., between cylinder and walls, crankshaft bearing, etc.).
Fuel power (FP) is a measure of the calorific value of the fuel used to deliver a particular value of BP.
Typical Class 8 truck diesel engines operate at 41 – 43% BTE. This means that 41 – 43% of the calorific value of the fuel is converted into power available at the crankshaft. The remaining 57 – 59% of the calorific value of the fuel is lost as heat that is carried off by the engine cooling system and engine exhaust system. In some advanced engines, turbochargers and waste heat recovery systems are used to increase BTE by recovering some energy from exhaust gases.
Show pathways for a further 5% improvement in engine efficiency (to achieve a BTE of 55%).
The four SuperTrucks developed by the respective teams are described in Section 5. All teams met or exceeded the SuperTruck I objectives set by DOE.
SuperTruck 2 (2017 – 2022)
SuperTruck 2 is a five-year, $160-million public-private partnership with industry matching federal grants dollar-for-dollar. Five teams are participating in the SuperTruck 2 program:
In August 2016, DOE announced that the four teams from SuperTruck 1 would continue their participation in SuperTruck 2.
A new team led by PACCAR, with truck manufacturer Kenworth as a team member, joined SuperTruck 2 in October 2017.
Objectives for the DOE SuperTruck 2 program are:
Improve freight efficiency (ton-miles per gallon) by 100% relative to a “best in class” 2009 truck (same baseline as in SuperTruck I), with a stretch goal of 120%.
Demonstrate 55% Brake Thermal Efficiency on an engine dynamometer.
Develop technologies that are commercially cost effective in terms of a simple payback.
Michael Berube, head of DOE’s Vehicle Technologies Office, acknowledged that the SuperTruck 2 objectives are beyond what the participants think they can achieve. However, with industry receiving dollar-for-dollar federal grants, Berube said, “…the program will allow them to try higher-risk technologies than they might on their own.”
Among the candidate technologies for SuperTruck 2 are:
Engines with waste heat recovery
Various forms of hybrid diesel-electric systems
More radical aerodynamic improvements, including active devices and completely redesigned cabs.
“Think of the benefit to the industry and to the country if they can meet that goal of doubling freight efficiency. There are 1.7 (to 2.5) million Class 8 trucks out there, each traveling an average of 66,000 miles a year. Doubling their efficiency could reduce petroleum consumption by 300 million barrels a year,” Berube said. At today’s fuel costs, that would save operators up to $20,000 per truck per year.
While most SuperTruck 2 programs wrapped up in 2022, PACCAR’s program was completed at the end of 2023 due to its later starting date.
SuperTruck 3 (2022 – 2027)
In October 2021, DOE launched a $199 million, five-year program to support the development of zero-emission vehicles, with $127 million directed to the SuperTruck 3 program, which will fund 50:50 cost-sharing projects to develop battery-electric and fuel cell medium- and heavy-duty trucks and freight system solutions with payload capacity and range equivalent to typical diesel-powered counterpart vehicles.
This DOE program includes three firms from the previous SuperTruck 2 program: PACCAR Inc., Volvo Group North America and Daimler Trucks North America.
PACCAR Inc.: $33 million in DOE cost-sharing funds to develop 18 Class 8 battery-electric vehicles with advanced batteries and a demonstration megawatt-class charging station.
Volvo Group North America: $18 million in DOE cost-sharing funds to develop a 400-mile-range Class 8 battery-electric tractor-trailer with advanced aerodynamics, electric braking, EV-optimized tires, automation and route planning. It also will develop and demonstrate a megawatt-class charging station.
Daimler Trucks North America: $26 million in DOE cost-sharing funds to develop and demonstrate two Class 8 hydrogen fuel cell trucks with a 600-mile range and 25,000-hour durability.
In addition, the SuperTruck 3 program includes Ford Motor Company and General Motors, both of which will focus on smaller freight vehicles, up to Class 6 Super Duty trucks.
3. The NACFE Annual Fleet Fuel Study
The North American Council for Freight Efficiency (NACFE) (https://nacfe.org/) describes its mission as working to “drive the development and adoption of efficiency enhancing, environmentally beneficial, and cost-effective technologies, services and methodologies in the North American freight industry.”
One of NACFE’s important products is the Annual Fleet Fuel Study, which reports on the adoption of 85 technologies and practices for improving freight efficiency among major North American Class 8 truck fleets operators. The 2019 Annual Fleet Fuel Study was based on data from 21 fleets operating 73,844 tractors and 239,292 trailers. You can download the NACFE 2019 Annual Fleet Fuel Survey here: https://nacfe.org/annual-fleet-fuel-studies/
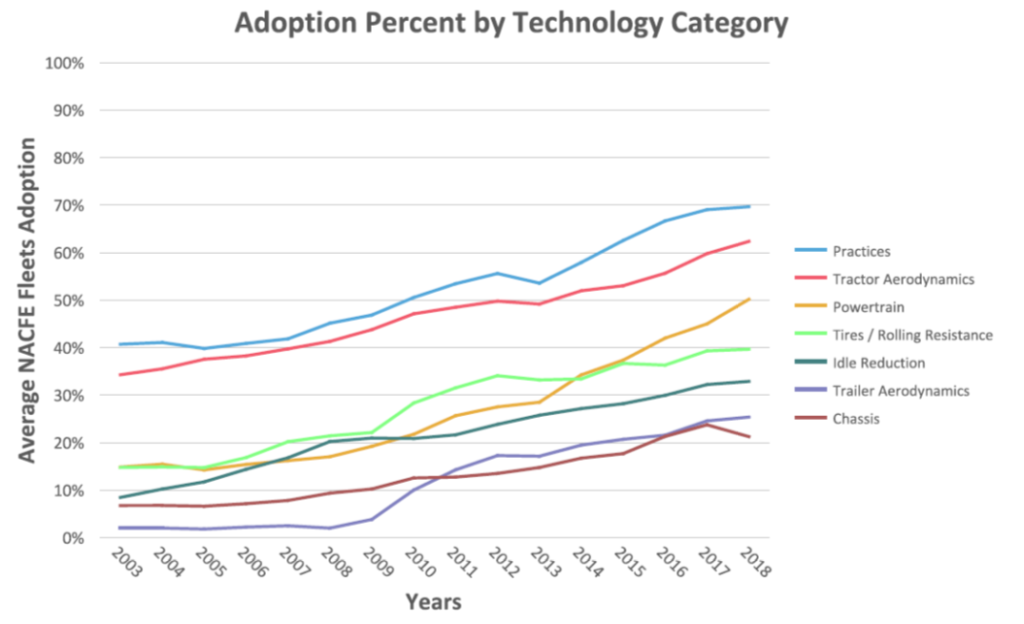
The following chart shows adoption rates among NACFE member fleets in seven technology categories. Tractor aerodynamic improvements (light blue line) have a high rate of adoption, at about 62% in 2018. In contrast, trailer aerodynamic improvements (purple line) have a much lower rate of adoption, at about 25% in 2018.
Source: NACFE 2019 Annual Fleet Fuel Study
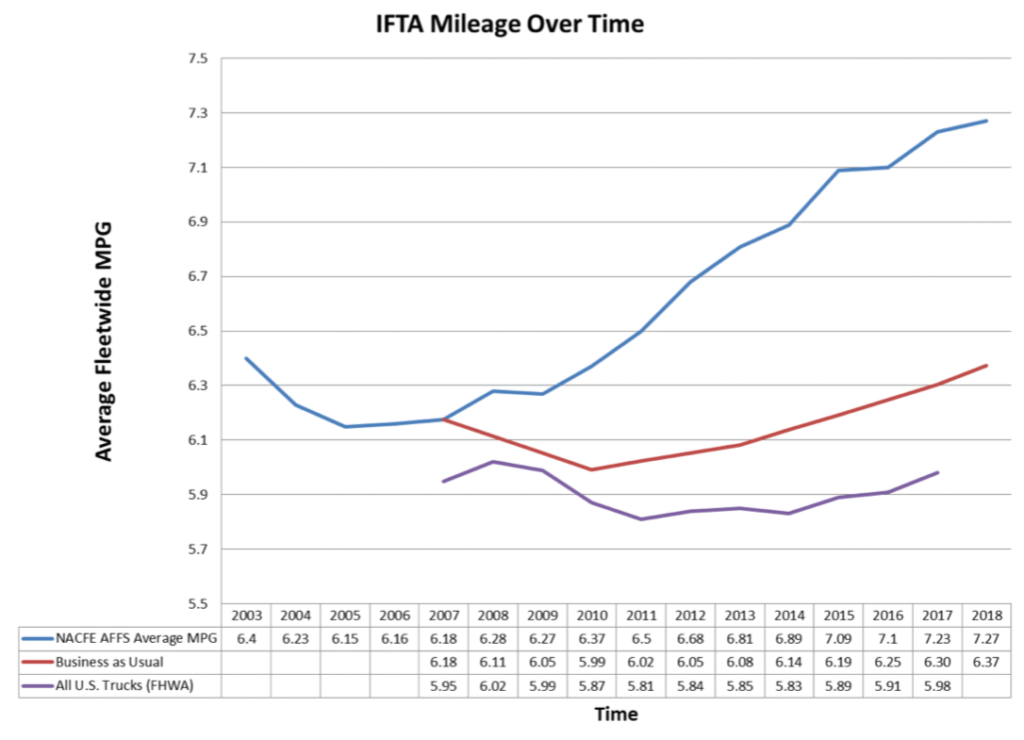
The Annual Fleet Fuel Study includes an analysis of the average fuel economy delivered by the combined Class 8 tractor-trailer fleet. Over the 16 years of this study, the average year-on-year improvement in fuel economy has been 2.0%. Fuel economy results are summarized in the following chart.
Source: NACFE 2019 Annual Fleet Fuel Study
Key points in this chart are:
The blue line represents the average fuel economy of the NACFE fleet from 2003 to 2018. In 2018, the NACFE fleet-wide average fuel economy increased to 7.27 mpg.
The red line is a hypothetical “business as usual” case, which is an estimate of what NACFE fleet fuel economy would be based only on improvements in engine efficiency. In 2018, “business as usual” would have yielded 6.37 mpg.
The difference between the blue and red curves represents the fuel efficiency improvements attributable to all other technologies and practices. In 2018, that difference was 0.9 mpg, meaning that actual performance was 14% better than the “business as usual” case.
The lowest (purple) curve is based on actual data reported to the U.S. Department of Transportation’s Federal Highway Administration (FHWA) for the approximately 2.5 million over-the-road tractor-trailers operating in the US. This average fleet fuel efficiency in 2017 was 5.98 mpg, well behind the fuel efficiency performance reported by NACFE fleet operators (which is included in the FHWA data).
4. Accessories available to improve the aerodynamic efficiency of existing tractor-trailers
The typical big rig has an aerodynamic drag coefficient, CD, of over 0.6, which has a huge effect on fuel economy, particularly during high-speed highway driving. Many truck manufacturers and third-party firms offer add-on kits with a variety of devices that can be installed on an existing tractor-trailer to improve its aerodynamic efficiency. Here we’ll look at a few of those devices:
Trailer tails (tapered boat-tails on the back of the trailer)
Trailer skirts
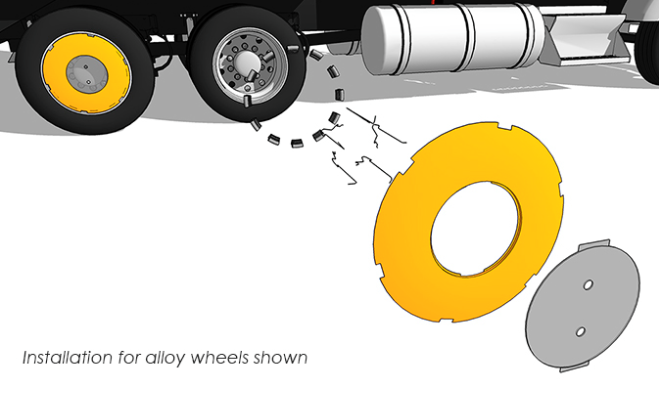
Aerodynamic wheel covers
The U.S. firm STEMCO (http://www.stemco.com) offers two aero kits for improving conventional tractor-trailer aerodynamics:
TrailerTail®, which is installed at the back of the trailer, reduces the magnitude of the turbulent low-pressure area that forms behind the trailer at high speeds.
EcoSkirt®, which is installed under the trailer, reduces aerodynamic drag under the trailer where air hits the trailer’s rear axles. The side fairings streamline and guide the air around the sides and to the back of the trailer.
Both of these aerodynamic devices are shown in the following figure. This was a tractor-trailer configuration that I saw frequently on I-90.
Source: STEMCO
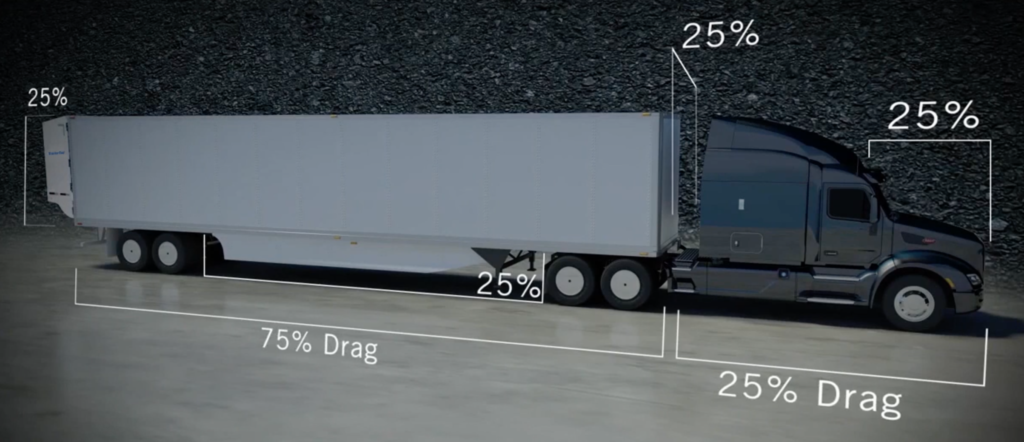
STEMCO allocates the primary sources of tractor-trailer aerodynamic drag as shown in the following figure.
Source: STEMCO
STEMCO claims the following benefits from their aero kits:
“TrailerTail® fuel savings complement other aerodynamic technologies.”
“A TrailerTail® reduces aerodynamic drag by over 12% equating to over 5% fuel efficiency improvement at 65 mph (105 kph) and over 12% fuel efficiency improvement when combined with STEMCO’s side skirts and other minor trailer modifications.”
STEMCO TrailerTail® meets the SmartWay® advanced trailer end fairings criteria for a minimum of 5% fuel savings and the STEMCO EcoSkirt® meets the advanced trailer skirts qualifications with greater than 5% fuel savings. The payback period for these aero devices is expected to be about one year.
You’ll find more details on STEMCO’s tractor-trailer drag reduction products, including a short “Aerodynamics 101” video, at the following link: http://www.stemco.com/aero-u/
More details on TrailerTail®, including its automatic deployment and operational use, are shown in a short video at the following link: https://www.youtube.com/watch?v=qPrM3-CCth8
Another firm, Aerotech Caps, offers a range of aero kits for improving truck aerodynamics, including aerodynamic wheel covers, aerodynamic trailer skirts, tail fairings and vortex generators. You can see their product line at the following link: https://aerotechcaps.com/#aerotechcaps
Source: Aerotech Caps
Aerotech Caps claims that its aerodynamic wheel covers deliver about 2.4% increased miles per gallon when installed on rear tractor and all trailer wheels. Payback period for this aero kit is expected to be about one year.
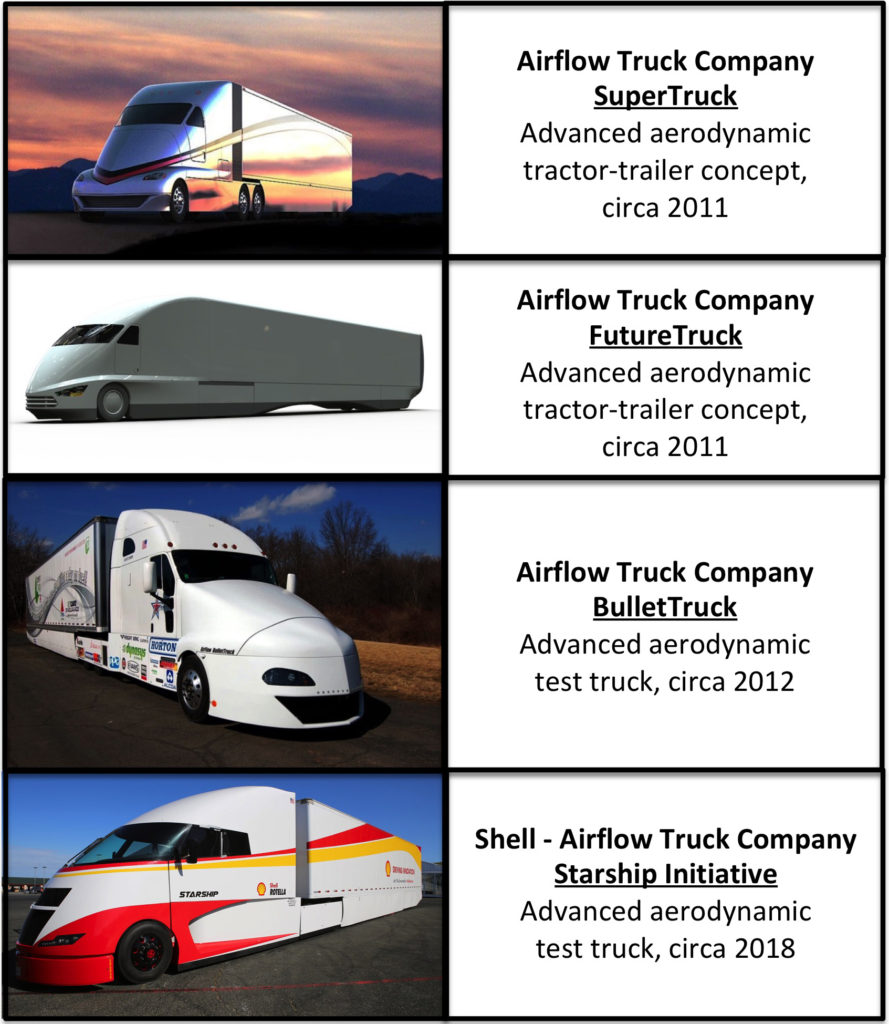
5. Aerodynamic Class 8 production tractor-trailers and SuperTrucks from major US manufacturers
Conventional, top-of-the-line tractor-trailers on the market today have significantly improved aerodynamic and fuel efficiency performance in comparison to their predecessors. The aero gains have been achieved by integrating many of the aero features described above into the basic designs for the latest Class 8 tractor-trailers on the market. In addition, optional aero kits are available to further improve performance.
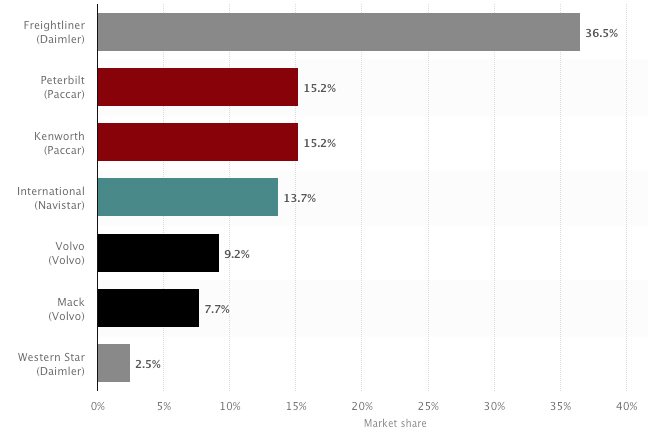
Class 8 truck manufacturers’ market share in the U.S. as of December 2019 is shown in the following chart.
Note that Freightliner is a Daimler North America brand along with Western Star. Peterbilt and Kenworth are PACCAR brands. International is a Navistar brand and Mack is a Volvo brand.
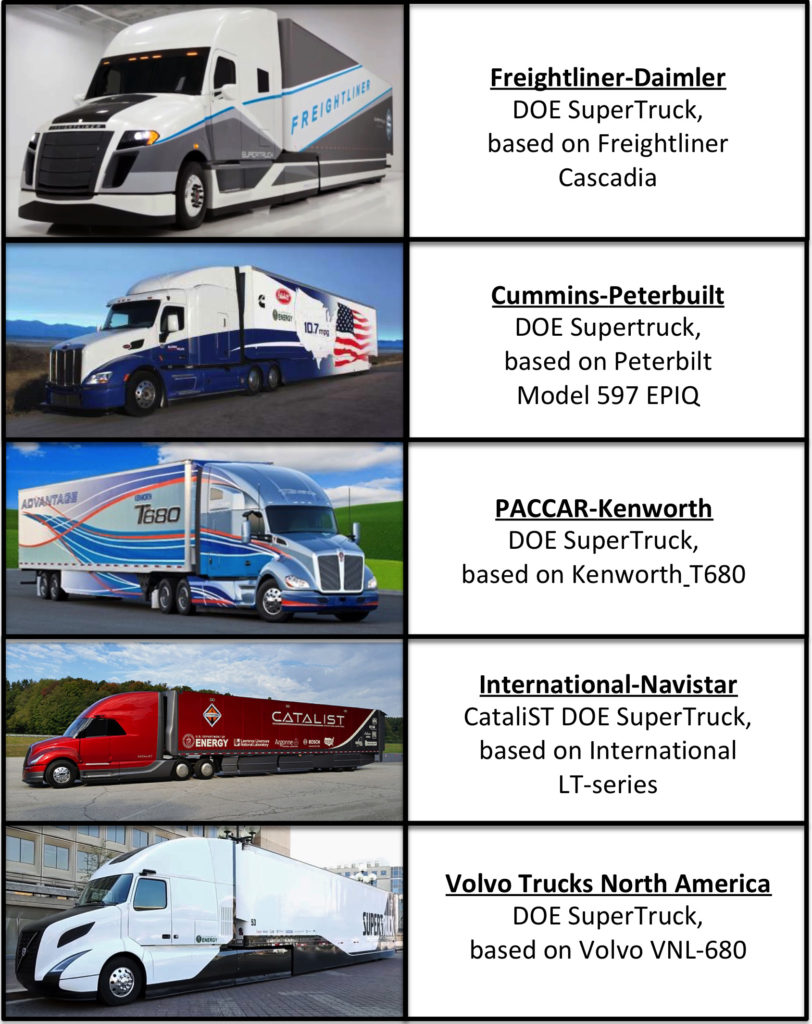
Now we’ll take a look at the most aerodynamic tractor-trailers offered in 2020 by the top five manufacturers in the US Class 8 truck market. Collectively, these manufacturers account for almost 90% of the US Class 8 heavy truck market.
Four of the five top manufacturers, Freightliner, Peterbilt, International and Volvo, led teams in the DOE SuperTruck 1 program (2010-2016) and are continuing their participation in the SuperTruck 2 program (2017 – 2022). Kenworth did not participate in SuperTruck 1, but did participate in SuperTruck 2 as a member of a new team led by their parent firm, PACCAR.
You’ll find my articles on these tractor-trailers at the following links:
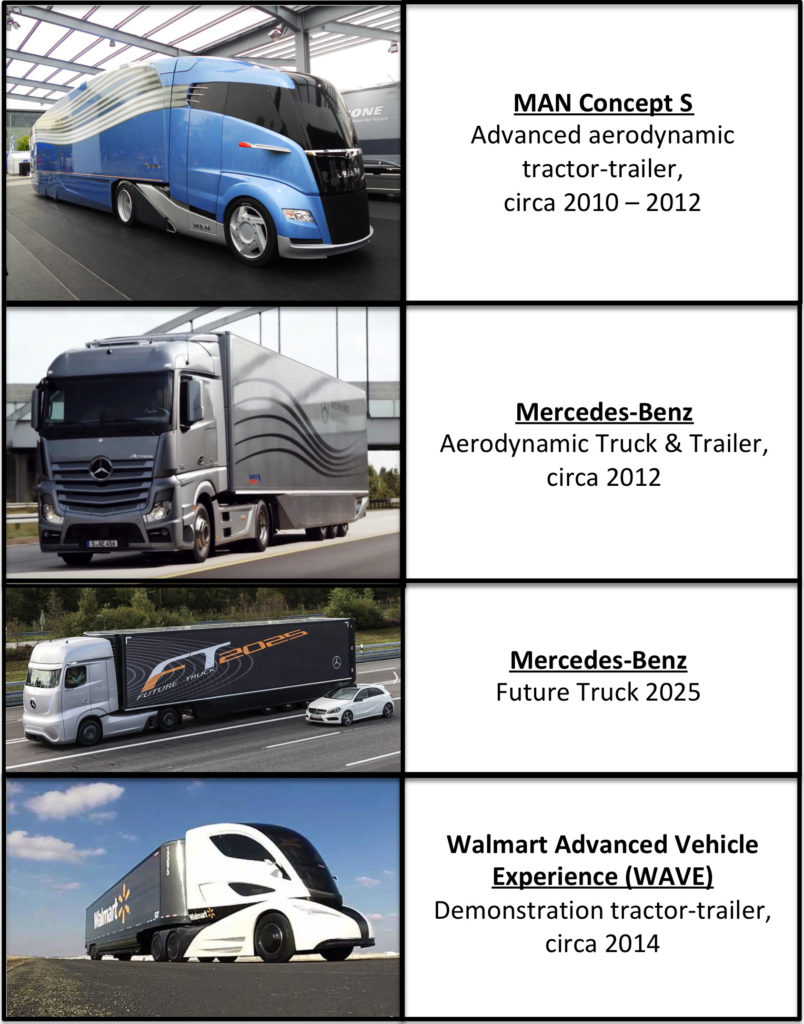
6. Other advanced Class 8 tractor-trailer designs and test trucks
The future of heavy freight vehicles is certain to include increasingly aerodynamic tractor-trailers with more efficient diesel and hybrid powertrains. While the five teams participating in the DOE SuperTruck program are demonstrating significantly improved Class 8 tractor-trailer performance, other firms have been working in parallel to develop their own advanced truck concepts and test trucks. In this section, we’ll take a look at the following advanced integrated tractor-trailers.
You’ll find my articles at these tractor-trailers at following links:
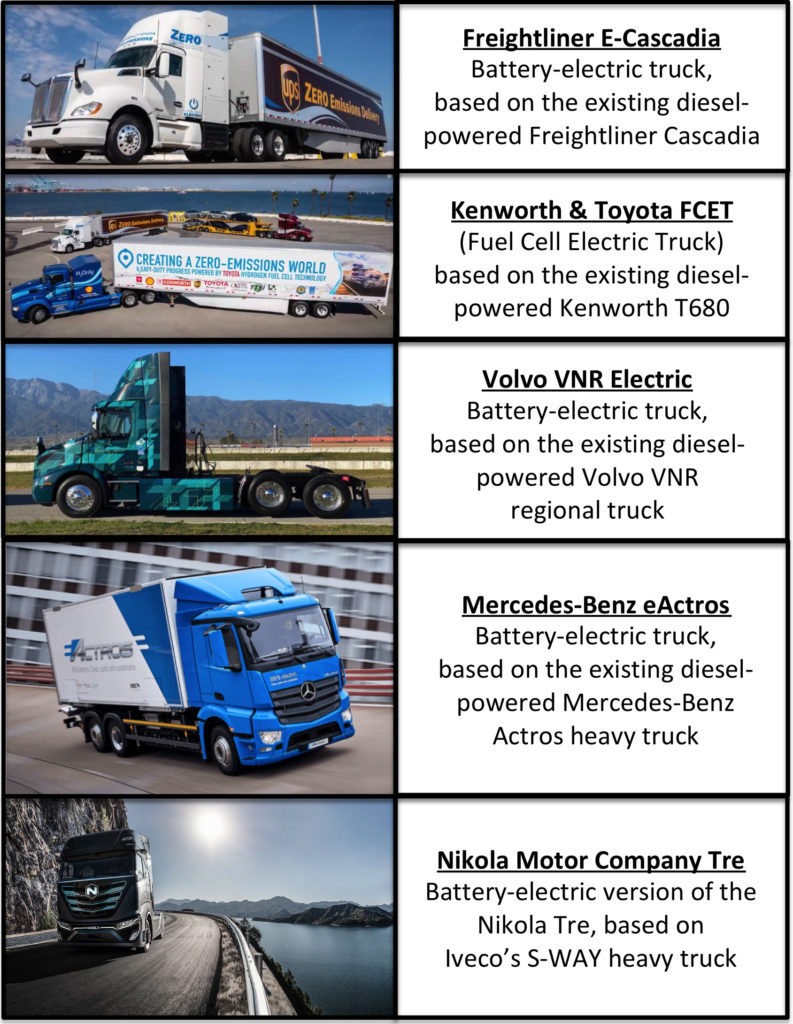
7. Advanced electric-powered Class 8 tractor-trailers
A variety of electric-powered heavy trucks and tractor trailers are being developed for the worldwide market and several are being operationally tested. The most common electric energy sources are be battery-electric or hydrogen fuel cell + battery.
“Battery electric vehicles are around 90% efficient with the electricity that flows into the charger when it is converted into motion by the onboard motors.”
“Hydrogen fuel cell vehicles are understandably less efficient, using the source electricity to break apart water, compress it, transfer it into the vehicle, and then convert the hydrogen back into electricity by combining it with ambient oxygen. Estimates for the efficiency of the electricity used to produce hydrogen, then get converted back to electricity in fuel cell vehicles, is around 40%.”
Lithium-ion batteries currently are the dominant type of battery used in electric vehicles. Boston Consulting Group reported that one particular type, the lithium nickel-manganese-cobalt (NMC) battery, has good overall performance, excels on specific energy, has the lowest self-heating rate, and is a preferred candidate for electric vehicles. For more information, see the 10 July 2019 Battery University article, “BU-205: Types of Lithium-ion Batteries,” at the following link: https://batteryuniversity.com/learn/article/types_of_lithium_ion
While less efficient in overall energy conversion, the hydrogen fuel cell weighs much less and can store much more energy than a comparably-sized, current-generation battery packaged for a heavy-duty truck application. For more information on hydrogen fuel cells, see the May 2017 University of California (UC) Davis presentation, “Fuel Cells and Hydrogen in Long-Haul Trucks,” at the following link: https://steps.ucdavis.edu/wp-content/uploads/2017/05/Andy-Burke-Hydrogen-Fuel-Cell-Trucks.pdf
In 2020, several heavy-duty electric truck designs are adaptations of existing Class 8 tractor-trailers with all-new electric powertrains. Examples are shown in the following table.
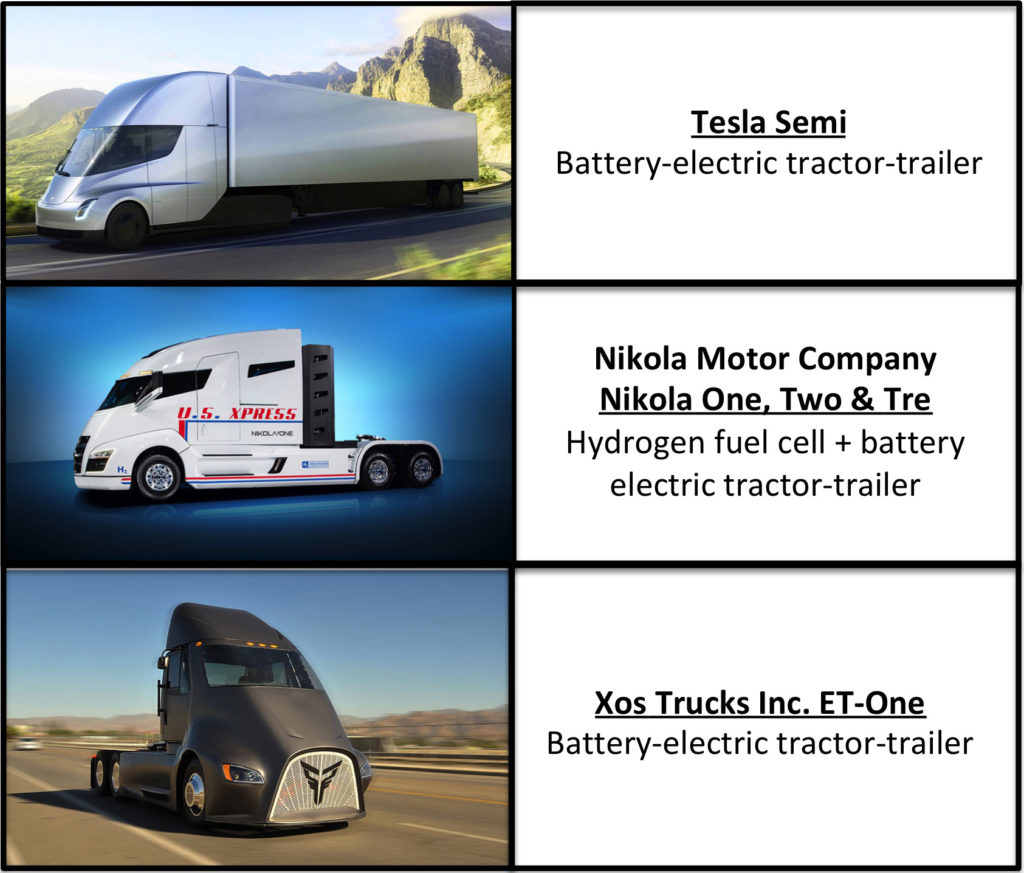
Some designs in 2020 were “clean-sheet” advanced electric-powered Class 8 tractor-trailers that also may offer a future path toward autonomous vehicle operation. Examples include:
Then there are even more advanced electric-powered heavy trucks that are designed originally as autonomous freight haulers without provisions for a driver’s cab. For example:
You can get a good overview of the current state of electric-powered heavy truck development in the following October 2019 video by Automotive Territory: “10 All-Electric Trucks and Freighters Showcasing the Future of Cargo Vehicles” (11:17 minutes): https://www.youtube.com/watch?v=smAleMBEszs
In this section, we’ll take a look at the “clean-sheet” advanced electric-powered Class 8 tractor-trailers. You’ll find my articles at these tractor-trailers at following links:
The DOE-sponsored SuperTruck 3 program initiated in 2022, which is funding work to develop battery-electric and fuel cell medium- and heavy-duty trucks and freight system solutions, is not funding any of the above three companies.
8. Conclusions:
Freight currently accounts for 9% of all U.S. greenhouse gas (GHG) emissions, and trucking is the dominant mode. The gradual phase-in of tractor-trailers with refined aerodynamics and diesel engines is improving fleet-wide fuel economy and thereby helping to decrease the carbon footprint of long-haul trucking.
Large improvements in freight efficiency (the product of payload weight in tons and fuel economy in miles per gallon; ton-miles per gallon) were demonstrated during the DOE SuperTruck 1 program, and greater gains are expected in SuperTruck 2, which continued into 2023. In the meantime, truck manufacturers are implementing SuperTruck technologies in their production model tractor-trailers. This is a significant step in the right direction.
With the introduction of electric-powered tractor-trailers in the next decade, the trucking industry has an opportunity to revolutionize its operations by deploying fleets of zero-emission trucks. The very aerodynamic, electric-powered Tesla Semi and the smaller freight vehicles being developed by Xos seem to be good first steps in starting the electric freight revolution. They will be joined by other electric-powered tractor-trailers and smaller freight vehicles being developed under the DOE SuperTruck 3 program, which will run thru 2027.
For the electric-powered trucks to compete effectively with diesel and hybrid-powered truck, the truck manufacturers and the freight industry needs to support deployment of the diverse nation-wide infrastructures for very-high capacity battery recharging and hydrogen refueling. With these new infrastructures in place, electric-powered freight operations can become routine and make a big contribution to reducing GHG emissions and the environmental impact of the nation’s freight hauling industry.
In spite of all of these opportunities for improving heavy tractor-trailer performance, there always will be cases when few of these are actually practical. As evidence, I offer the following photo taken at 80 mph on I-90 in South Dakota during my 2016 road trip. How do you optimize that giant drag coefficient?
National Academies report: “Review of the 21st Century Truck Partnership: Third Report,”, particularly Chapter 8, “SuperTruck,” 2015; https://www.nap.edu/download/21784
“NETL Project Partner Daimler Truck North America Debuts Next Level of Freight Efficiency with the Freightliner SuperTruck II,” National Energy Technology Laboratory press release, 3 August 2023: https://netl.doe.gov/node/12767
My 11 December 2018 post, “Lots of Land Speed Record (LSR) Action in 2018,” provides background information on land speed record governance and a look at the fastest cars competing in the 2018 LSR season. 2018 highlights included:
The North American Eagle team, with driver Jessi Combs, continued to extend the performance of their jet-powered LSR car on a track in the Alvord Desert in Oregon.
The Bloodhound team in the UK was saved from insolvency, literally at the last moment, when the business and assets were bought by Yorkshire-based entrepreneur Ian Warhurst.
Salt conditions at the Bonneville salt flats in Utah were very good and many speed records were broken.
The North American Eagle LSR car crashed during a high-speed run in the Alvord Desert in August, killing driver Jessi Combs.
The salt conditions at the Bonneville salt flats were poor, resulting in rough driving conditions and generally lower speeds during Bonneville Speed Week (August) and the Utah Salt Flats Racing Association (USFRA) World of Speed (September). The Bonneville World Finals (October) were cancelled because of wet conditions.
The Carbinite LSR car, the Carbiliner, crashed during a high-speed run at the World of Speed 2019 in September, severely injuring driver Rob Freyvogel.
The 29th Annual Speed Week at Lake Gairdner, Australia in March had only one run over 300 mph (483 kph) in hot, dry conditions.
Now with proper financing, the Bloodhound LSR team transitioned to the next phase of the project, arriving at the Hakskeen Pan track in South Africa in October and conducting high-speed testing, which concluded successfully in November.
Let’s take a look at the 2019 LSR season in more detail.
1. North American Eagle
In August 2019, the North American Eagle team, with driver Jessi Combs, returned to the Alvord Desert in Oregon to attempt to break the official Women’s Land Speed Record set by Kitty O’Neil in 1976 with a two-way average speed of 512.710 mph (825.127 kph) in the rocket-powered SMI Motivator at the same venue. The North American Eagle team website is here: https://www.landspeed.com
The North American Eagle land speed record car. Source: North American EagleDriver Jessi Combs. Source: North American Eagle
An investigation into the cause of the crash revealed that the front wheel assembly of the car collapsed, possibly due to collision damage from hitting something on the track at high speed.
North American Eagle Crew Chief Les Holm reported Jessi Combs’ second run was measured at a speed of 548.342 mph (882.471 kph), yielding a two-way average speed of 531.889 mph (855.992 kph). Hemmings news reported that the North American Eagle team has submitted Jessi Combs’s two-way average speed results to the Guinness Book of World Records to claim the title of fastest woman on the planet.
It is not yet known if Jessi Combs’ two-way average speed will qualify as an official FIA world land speed record.
The Petersen Automotive Museum in Los Angeles held an exhibition entitled “Jessi Combs: Life at Full Speed” to commemorate the life and accomplishments of this extraordinary person.
Source: Petersen Automotive Museum
The Jessi Combs Foundation was founded in 2019. The mission of the Foundation is to “educate, inspire and empower the next generation of female trailblazers and stereotype-breakers.” The Foundation’s website is here: https://www.thejessicombsfoundation.com/mission-statement/
In June 2020, the Guinness World Record was posthumously awarded to Jessi Combs, declaring: “The fastest land speed record (female) is 841.338 kph (522.783 mph), and was achieved by Jessi Combs (USA) in the Alvord Desert, Oregon, USA, on 27 August 2019. Jessi is the first person to break this record in more than 40 years.” This record is posted on the Guinness World Records website here: https://www.guinnessworldrecords.com/world-records/fastest-land-speed-record-(female)
2. Bonneville Speed Week 2019: 13 – 15 August 2019
Now let’s look at a few of the top challengers at Speed Week 2019.
Turbinator II
At the Bonneville World Finals in 2018, Team Vesco’s gas turbine powered Turbinator II, with Dave Spangler driving, made a one-way run through the measured mile of 493.996 mph (795.009 kph), with an exit speed of 503.332 mph (810.034 kph). Turbinator II became the world’s first wheel-driven vehicle to exceed 500 mph and 800 kph.
In 2019, Dave Spangler was unable to complete a single run with Turbinator II during Bonneville Speed Week 2019. Three runs on the 2-mile “short” course were attempted on 14 – 15 August, but none were completed, for a variety of issues. You can watch a short video about Team Vesco at Speed Week 2019 here:
After Speed Week 2019, Team Vesco reported, “In the interest of safety and to correct our course while navigating toward our goal to become the first wheel driven car to set an official National or World record over 500 MPH, we must discontinue racing for the remainder of 2019. To improve our team, we have already begun a search for a company with turbine control engineering capabilities to partner with us.” You’ll find more information on the Team Vesco website here: https://www.teamvesco.com
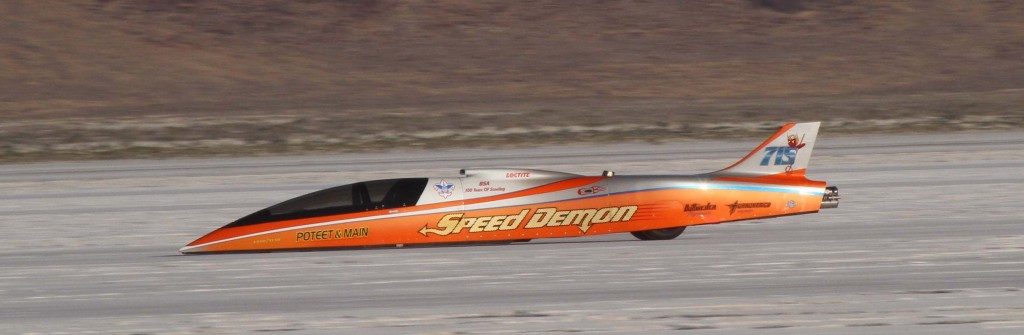
Speed Demon
George Poteet’s Speed Demon is a blown (supercharged or turbocharged) fuel (not gasoline) streamliner (BFS) that currently holds two-way land-speed records in five out of seven of Bonneville’s BFS classes: A, B, C, D and F. The two remaining classes are AA/BFS and E/BFS. The team’s goals for 2019 were to achieve records in these remaining classes and to raise its fastest two-way speed record to over 480 mph (772 kph). The teams current record, set in 2013, stands 437.183 mph (703.578). You can read more about these plans in the following Motor Tend article: https://www.hotrod.com/articles/pottet-speed-demon-aims-480-mph-bonneville/
To compete in several different classes, Speed Demon is designed to accommodate several different displacement engines that have been configured to fit inside the car’s svelte fuselage. At Speed Week 2019, the team had four different Duttweiler engines to challenge BFS records in Classes A, AA, C and E.
Speed Demonwas the only car that made runs over 300 mph (483 kph) during Speed Week 2019. On the “long” course, which was shortened to two miles because of poor salt conditions, Speed Demon achieved the following speeds:
13 Aug 2019: 300.648 mph (483.846 kph) and 332.815 mph (535.614 kph) with the E “small block” engine
15 Aug 2019: 369.533 mph (594.706 kph) with the AA “big block” engine
None of these runs broke an existing class speed record. However, Speed Demon and George Poteet were honored with the Hot Rod Magazine trophy for fastest run during Speed Week 2019.
Tom Flattery’s Salt Shark, a Class B blown gas (gasoline) streamliner (B/BGS), made its first appearance at Bonneville Speed Week 2019. The Salt Shark is powered by a twin-turbo, 427 cubic inch, fuel injected LSX engine from Golen Engine Service in New Hampshire. Salt Shark reached a maximum speed of 290.568 mph (467.624 kph) on 15 August 2019, making it the second fastest car at Speed Week 2019 after Speed Demon. You’ll find more information on the Salt Shark Facebook page here: https://www.facebook.com/Bonneville-Salt-Shark-226594851348688/
The Treit and Davenport Target 550 is a Class AA blown fuel streamliner (AA/BFS). At Bonneville Speed Week 2019, new driver Valerie Thompson took the car to a maximum speed of 270.762 mph (435.749 kph) on 15 August 2019. Rough salt conditions prevented a return run.
At the Utah Salt Flats Racing Association’s (USFRA) World of Speed event in October 2019, rough salt conditions persisted. The team reported, “On its first run, the car was bouncing up and down and bottoming almost from the start line. Valerie clocked at 291 mph (468 kph), but the car went airborne due to the rough course. Parts broke, damaging both engines. The drag chutes deployed properly and the car came to a safe stop. Thankfully no one was hurt.”
In January 2020, the Treit and Davenport team plans to ship Target 550 to Australia. With Valerie Thompson driving, the team will challenge the world speed record for its class in March 2020 during Speed Week at Australia’s Lake Gairdner.
3. Utah Salt Flats Racing Association (USFRA) World of Speed 2019: 16 – 16 September 2019
Like Bonneville Speed Week 2019, the USFRA World of Speed 2019 was affected by wet salt conditions. Results are posted on the USFRA website here: https://saltflats.com
Only three cars reached speeds greater than 300 mph (483 kph) on runs during World of Speed 2019. One of them, the Carbinite LSR car, the Carbiliner, was destroyed in a high-speed crash and the driver was seriously injured.
Let’s take a look at the three fastest LSR cars at this meet.
Carbinite LSR – Carbiliner
The Carbiliner is a Class AA blown fuel streamliner (AA/BFS). In 2018, it was one of five LSR vehicles to exceed 400 mph (644 kph) during Bonneville Speed Week, making runs of 406.750 mph (654.601 kph) and 413.542 mph (665.531 kph).
At World of Speed 2019, the Carbiliner, driven by Rob Freyvogel, crashed during a high-speed run on 15 September 2019. The car had been measured at an average speed of 392 mph (631 kph) and was still accelerating heading into the final mile of the long course when the crash occurred. While the rugged structure of the cockpit provided some protection, Rob Freyvogel was seriously injured.
The Strasburg family’s LSR car is a Class C blown fuel lakester (C/BFL). With almost perfect salt conditions at Bonneville in 2018, the Strasburg family set a new world land speed record for a lakester (an open-wheeled car) with an average speed of 373 mph (600 kph).
At World of Speed 2019, this lakester, driven by Anita Strasburg, exceeded 300 mph (483 kph) on several runs. On the best run, Anita Strasburg recorded 347.484 mph (559.221 kph) in the last (3rd) mile with an exit speed of 350.493 mph (564.064 kph).
The Beamco is a Class D unblown gas streamliner (D/GS) owned by Team Vesco and driven by Bob Blakely.
The Beamco streamliner. Screenshot from Real Tuners video at USFRA 15 September 2019
In the following video, you can take a ride aboard the Beamco streamliner as Bob Blakely raised the D/GS 2-way average speed record to 312.664 mph (503.184 kph) during the World of Speed 2019 in rough course conditions.
Blakely also became a new 300 mph Club member.
4. Bonneville World Finals 2019
On 28 September 2019, Bill Lattin, SCTA President, reported: “Unfortunately Mother Nature is at again. We were able to drag a good course and now there is standing water on it. Due to the weather forecast coming we have decided to cancel World Finals.”
After being rescued from insolvency in December 2018 by Ian Warhurst, a new company called Grafton LSR Ltd. was formed in March 2019 to be the car’s legal owner. The team was renamed “Bloodhound LSR” and the team headquarters were moved to the UK Land Speed Record Center in Berkeley, Gloucestershire, UK. The Bloodhound LSR website is here: https://www.bloodhoundlsr.com
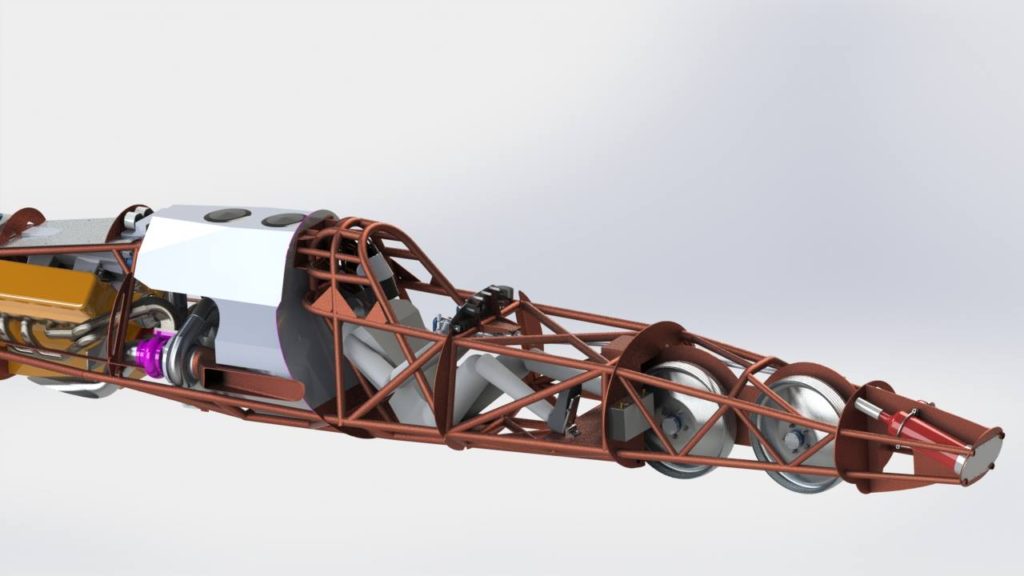
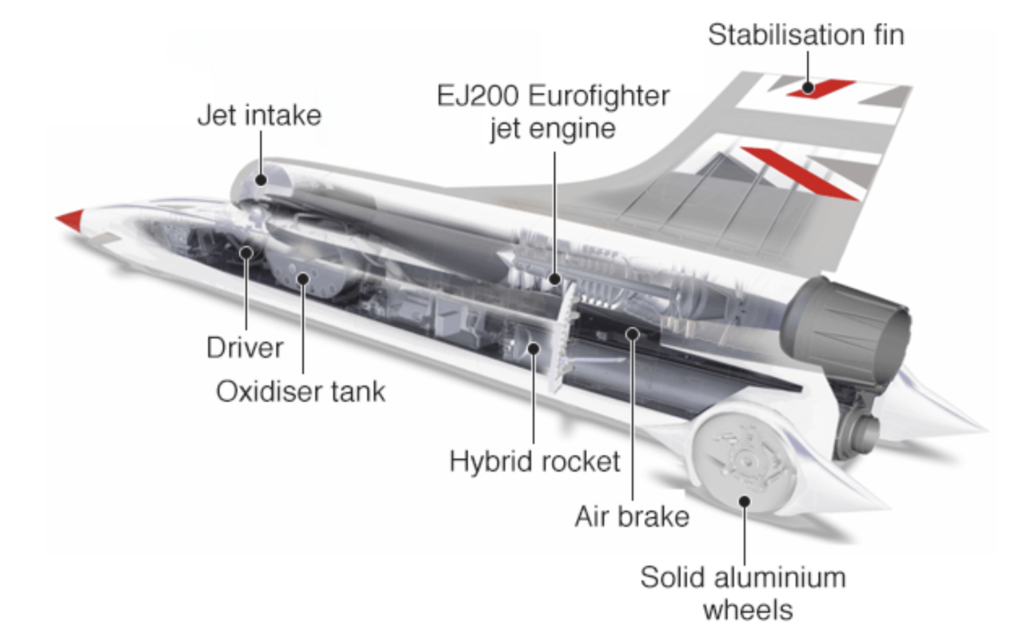
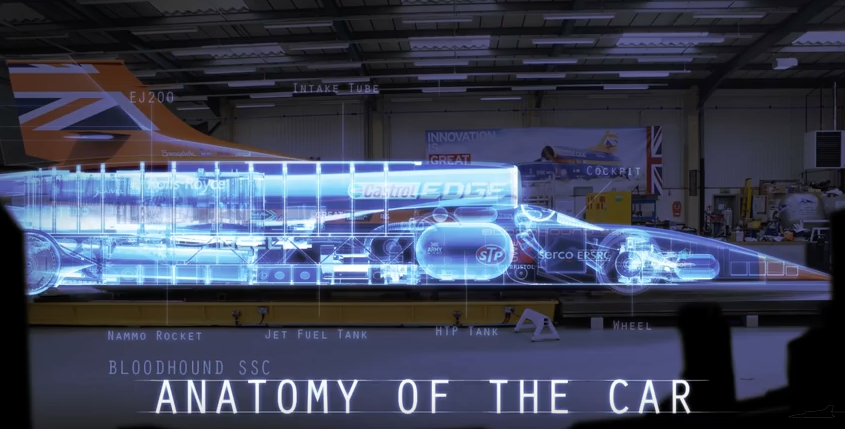
The configuration of the jet + rocket-propelled Bloodhound LSR is shown in the following diagram.
Source: Bloodhound LSR
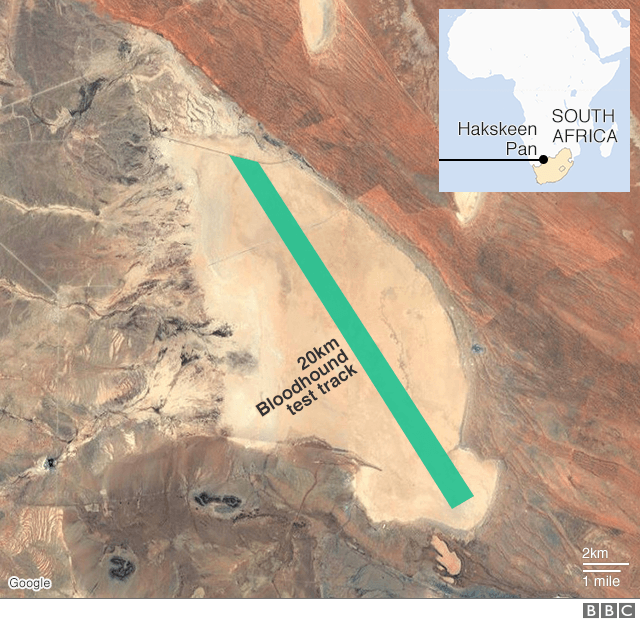
The team’s goal for 2019 was to conduct high-speed testing of the Bloodhound LSR at the intended land speed record venue, the Hakskeen Pan in South Africa. The Bloodhound LSR team states that high-speed testing is “needed to allow the team to test many aspects of the car and all operational procedures in advance of the world land speed record runs, currently planned for late 2020.”Hakskeen Pan is a very flat dry lake bed with the world’s largest “unworked” saltpan. A test track measuring 20 km (12.4 miles) long and 1,100 meters (0.68 mile) wide has been established on the saltpan for use by Bloodhound LSR. The layout of the test track on Hakskeen Pan is show in the following diagram. For more information on this test track, see my 8 September 2015 post, “Just How Flat is Hakskeen Pan?” here: https://lynceans.org/all-posts/just-how-flat-is-hakskeen-pan/
For the high-speed test phase, the Bloodhound LSR was propelled only by its EJ200 jet engine, which is rated at 90 kN (20,230 pounds) of thrust. This engine is based on Rolls-Royce gas turbine engine technology and is built by the EuroJet Turbo GmbH consortium. The Nammo hybrid rocket engine was not installed for the 2019 high-speed tests.
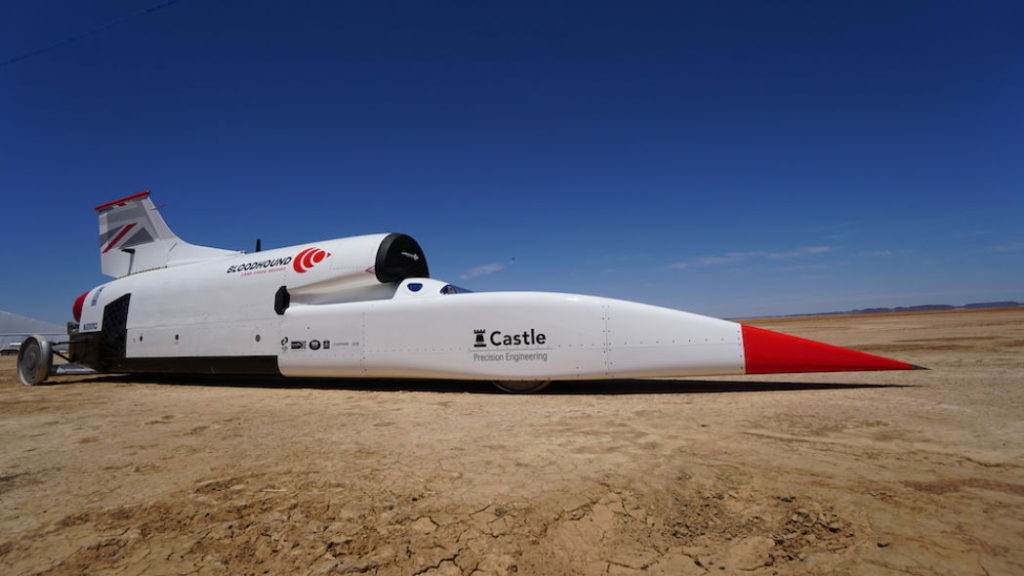
Completed Bloodhound LSR unveiled at Hakskeen Pan. Source, both photos: Bloodhound LSR
Test runs began on 27 October 2019, with Andy Green driving the Bloodhound LSR. Information on all of the test runs, and selected videos, are available on the Bloodhound LSR website, under the “News” tab. Here’s the direct link: https://www.bloodhoundlsr.com/category/bloodhound-lsr-news/
High-speed testing was completed on 17 November 2019 with a 628 mph (1,010 kph) run. The team was pleased to report, “Mission accomplished.” You can watch a short video of this final high-speed test run here.
BBC reported, “The car’s costs are currently being underwritten by wealthy Yorkshire businessman Ian Warhurst. He says the next phase of the project will have to be funded by others, most likely corporate sponsors….. ‘With the high-speed testing phase concluded, we will now move our focus to identifying new sponsors and the investment needed to bring Bloodhound back out to Hakskeen Pan in the next 12 to 18 months’ time.’”
Development continues on the hybrid rocket engine that will be added to the Bloodhound LSR for the next set of high-speed runs at Hakskeen Pan.
You’ll find my previous posts on the Bloodhound LSR team and car here:
6. 29th Annual Speed Week at Lake Gairdner, Australia
Speed Week at Lake Gairdner was held from 4 to 8 March 2019 in hot, dry weather with fair salt conditions. There was only one run over 300 mph (483 kph) at this meet. Jim Knapp’s #1584, the Knappsters Streamliner, which is a Class AA blown fuel streamliner (AA/BFS), made the top speed run of the meet at 309.438 mph (497.994 kph).
The record for the top speed run at the Annual Speed Week at Lake Gairdner was set in 2018 by Les Davenport driving the Treit and Davenport Target 550, another AA/BFS, at 345.125 mph (555.425 kph). Track conditions and weather were excellent in 2018. The Treit and Davenport team is planning to be back in 2020.
7. The world’s fastest piston-powered car, Challenger 2, is for sale
Challenger 2 is a Class AA unblown fuel streamliner (AA/FS). Danny Thompson’s record-setting 448.757 mph (722.204 kph) average runs in Challenger 2 during Bonneville Speed Week 2018 set a new official world land speed record for piston-powered cars.
In November 2019, Mecum Auctions announced that this famous streamliner will come up for auction at Mecum’s Kissimmee, Florida event in January 2020. No starting price has been announced. In case you’re interested, you’ll find Mecum’s listing for the Challenger 2 here: https://www.mecum.com/lots/FL0120-397299/1968-challenger-2-streamliner/
Challenger 2 at Bonneville Speed Week 2018. Source: Mecum Auctions
8. 1959 Mooneyes Moonliner on display at Speed Week 2019
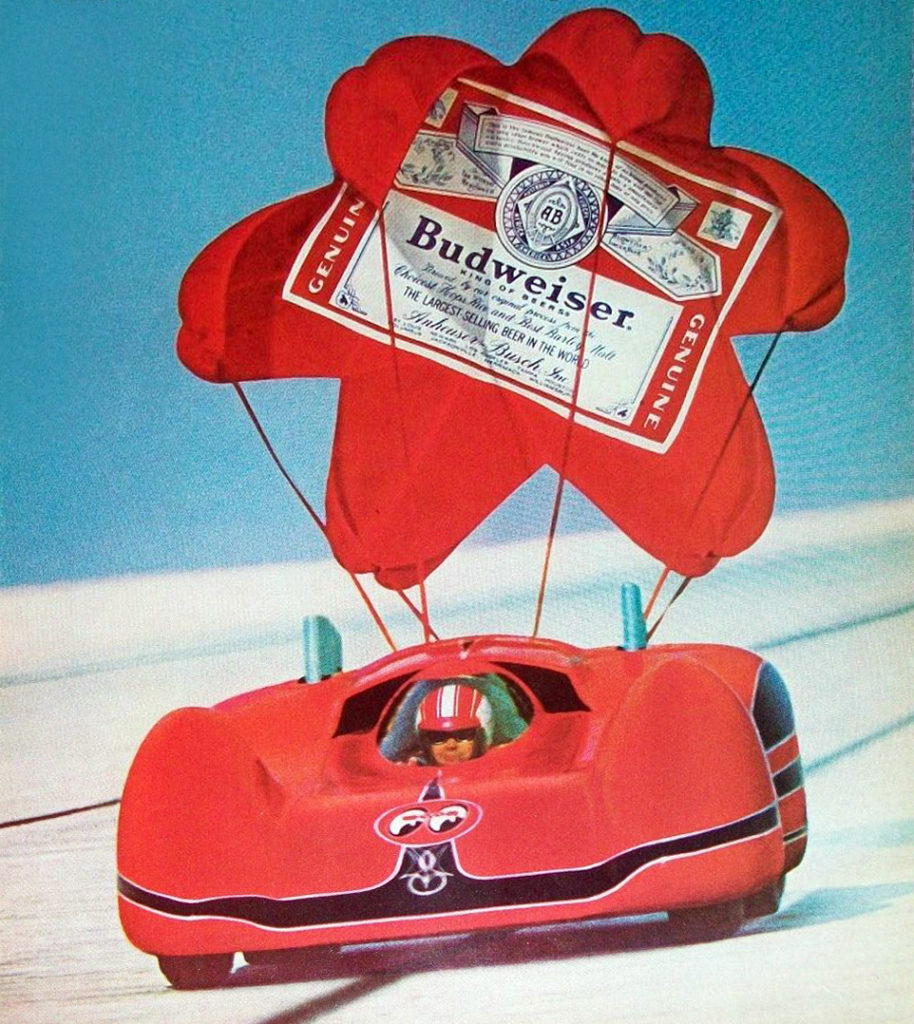
At Bonneville Speed Week 2019, the beautiful 1959 Mooneyes Moonliner, built by Jocko Johnson for Dean Moon, was on display. This streamliner originally was powered by an Allison V-12 aircraft engine; later replaced by a fuel-injected, big-block Chevrolet engine. You can follow the Moonliner on Facebook here: https://www.facebook.com/Mooneyes/
The Moonliner was only run for exhibitions and car shows, and never competed at any speed trials. Nonetheless, the Moonliner is an exotic piece of rolling automotive art that could have been an exciting Class AA unblown gas streamliner (AA/GS).
In 1974, the Moonliner, powered by the big-block Chevrolet engine, driven by Gary Gabelich, and painted red and black (Budweiser colors) was at the Bonneville salt flats for a publicity run for Budweiser. The Moonliner is reported to have reached 285 mph (458 kph) during this event.
Mooneyes Moonliner at Bonneville. Source: 1974 Budweiser advertisement
You’ll find many historic photos of the Moonliner at Bonneville in 1974 on the Getty Images website at the following link. Be sure to check out the photos of the unusual exhaust system.
The first land speed record (LSR) at greater than 400 mph (643.7 kph) was set on 17 July 1964 by UK driver Donald Campbell in the wheel-driven, gas turbine-powered streamliner named Bluebird CN7. Regarding his new official land speed record of 403.10 mph (648.73 kph) in the measured mile, a disappointed Campbell is reported to have said, “We’ve made it – we got the bastard at last.” Campbell thought the Bluebird CN7 was capable of much higher speeds, but did not mount another LSR challenger with that car.
This year, 54 years after Campbell’s record run, Team Vesco’s Turbinator II became the first wheel-driven vehicle to exceed 500 mph (804.7 kph). In addition, there are several LSR contenders in diverse vehicle designs that regularly are making runs in the 400 – 500 mph range. Donald Campbell might be impressed with the current state of the “sport.” Let’s take a look at what’s happened in 2018.
1. Governing land speed records
The FIA (Fédération Internationale de L’Automobile) establishes the process for making world land speed record (LSR) attempts and certifying the resulting speeds. FIA record attempts are standardized over a fixed length course (mile and kilometer) and averaged over two runs in opposite directions that must be completed within one hour. The FIA’s home page for land speed records is at the following link:
The FIA defines four basic categories of LSR vehicles:
Category A LSR vehicles are purpose-built, wheel-driven automobiles that may be powered by any of a variety of engines, including Otto cycle (4-cycle), Diesel cycle (2-cycle), rotary, electrical, gas turbine, or steam, or any hybrid combination of these engines.
Category B LSR vehicles are derived from series production automobiles, with the same basic engine options as Category A (as long as you can stuff it into a series production automobile).
Category C applies to “special automobiles,” including LSR vehicles that are not wheel-driven, but instead are powered by the thrust of jet and/or rocket engines.
Category D LSR vehicles are drag racing automobiles.
Within Categories A and B, the FIA defines Groups based on fuel type and Classes based on engine displacement and vehicle weight. In Category C, Groups may be defined based on engine type.
World motorcycle LSR records are managed separately by the FIM (Fédération Internationale de Motocyclisme).
In contrast to FIA LSR rules, US National land speed records are the average of two runs going in the same direction over a two-day period. The rationale is that national events such as Bonneville Speed Week involve too many vehicles to swap directions on the course in less than 60 minutes. The basic processes defined by the Southern California Timing Association (SCTA) and used during Speed Week are as follows:
For each run on the Bonneville five-mile long course, five different speeds are determined:
The first speed reported is referred to as the “quarter” and is the average speed over a 1,320-foot (quarter mile) timing trap that starts at the 2-mile marker.
Next, times are recorded and average speeds are determined over three flying mile intervals: from mile 2 to mile 3, from mile 3 to mile 4 (the “middle mile”), and from mile 4 to mile 5. Official time slips refer to these as Mile 3, Mile 4, and Mile 5.
The final timing number is called “exit speed”, or terminal speed, which is an average speed measured over a 132-foot trap at the end of Mile 5.
When a car makes a first run at a speed greater than an existing record, it goes into “impound,” where the following process applies:
After being impounded, the team has four hours to work on the car.
The team must be back at the track by 6 AM the next day, when it has another hour of prepare the car for the second run (i.e., add fuel, ice coolant, etc.).
The car must be at the start line by 7 AM, ready to make its second run.
If the average between the two runs is greater than the existing record, a new National record is awarded.
The SCTA defines several vehicle categories, with their Category A (special construction vehicles) being comparable to FIA Category A.
2. Category C LSR contenders in 2018
Category C LSR contenders, with jet or rocket propulsion, have been the fastest LSR vehicles in the world since Craig Breedlove set the absolute land speed record at 407.447 mph (655.722 kph) in the measured mile at Bonneville on 5 August 1963 in the turbojet-powered, three-wheeled Spirit of America. The FIA considered this to be an unofficial record because Spirit of America only had three wheels. This record later was ratified by the FIM. Since 1963, six other Category C LSR vehicles have held the absolute land speed record: Wingfoot Express, Green Monster, Spirit of America Sonic 1, Blue Flame, Thrust2 and ThrustSSC (supersonic car).
The current FIA absolute land speed records are:
763.035 mph (1,227.986 kph) for the measured mile, and
760.343 mph (1,223.657 kph) for the measured kilometer
These records were set on 15 October 1997 by the UK LSR vehicle Thrust SSC, which completed the required two runs in opposite directions within one hour on a track in the Black Rock Desert in Nevada. Thrust SSC was driven by Andy Green when it became the first supersonic LSR vehicle, achieving an average speed through the measured gates of Mach 1.016.
In 2018, the two primary Category C LSR contenders were the UK Bloodhound SSC, which is under development and successfully completed low speed trials (> 200 mph, 322 kph), and the US North American Eagle, which has been running for many years and has reached a maximum speed of > 500 mph (805 kph). Following is a brief review of these Category C LSR programs.
Bloodhound SSC – Did it die in 2018, or is there still hope?
In posts in March 2015, September 2015 and January 2017, I reported on the ambitious UK project to create a 1,000 mph land speed record car known as the Bloodhound SSC.
In 2006, Lord Drayson, the UK Minister of Science, proposed developing a new UK LSR vehicle to LSR holders Richard Noble (Thrust 2) and Andy Green (Thrust SSC). This led to the formation of the Bloodhound SSC project, which was announced on 23 October 2008, along with an associated education component designed to inspire future generations to take up careers in science, technology, engineering and mathematics (STEM). The Bloodhound SSC project website is here:
Original plans were for the Bloodhound SSC to make its LSR runs on the Hakskeen Pan in South Africa (see my March 2015 post), with initial trial runs starting in 2016. As development of Bloodhound SSC continued, the dates for the initial LSR runs slipped gradually to 2017, 2018 and most recently to the end of 2019.
In 2017, Bloodhound SSC conducted five weeks of testing, including its first successful public “shakedown” run on 26 October 2017, on the 9,000 foot (1.67 mile, 2.7 km) runway at the Cornwall Airport in Newquay, UK. Powered by its Rolls-Royce EJ200 jet engine and driven by Andy Green, Bloodhound SSC reached a modest top speed of 210 mph (378 kph) on this short runway.
Bloodhound SSC at Newquay. Source: http://www.bloodhoundssc.com/news/
You’ll find a YouTube video of the Newquay trial runs here:
The trials at Newquay demonstrated the satisfactory performance of vehicle systems and provided confidence for further development and testing. In 2018, Bloodhound SSC remained in the UK, but no further trial runs were made.
In 15 October 2018, Bloodhound Programme Ltd., the UK company behind the Bloodhound SSC, entered into “administration,” which is comparable to a Chapter 11 filing in the US and is intended to give a company in financial difficulties protection from creditors for a limited period while it attempts to reorganize and seek new financing. Bloodhound Programme Ltd. was seeking about $33 million (about £25 million) to fund the program through the actual land speed record attempts in South Africa in 2020 – 2021.
Source: http://www.bloodhoundssc.com/news/
On 7 December 2018, BBC News reported that the attempts to reorganize had failed. Joint administrator Andrew Sheridan reported, “Despite overwhelming public support, and engagement with a wide range of potential and credible investors, it has not been possible to secure a purchaser for the business and assets.” You can read the BBC report here:
Plans are being implemented to return or sell assets. Driver Andy Green said the Bloodhound SSC vehicle was now available for sale at a price of about £250,000 ($318,275).
Let’s hope that the Bloodhound SSC project can find a last minute investor and a route to recovery.
North American Eagle – Continuing to make progress in 2018
Ed Shadle and Keith Zanghi started the North American Eagle LSR project 20 years ago, in 1998. Their idea was to take a surplus Lockheed F-104 jet fighter fuselage with a General Electric J-79 jet engine and afterburner and create a viable absolute LSR challenger. The result of their efforts, with assistance from a team of volunteers and support from many sponsors, is the North American Eagle LSR vehicle shown below.
You can view a YouTube video on the North American Eagle LSR program here:
Here’s a shorter video of the September 2016 speed run in the Alvord Desert in Oregon. During this run, driver Jessi Combs achieved a maximum speed of 477.59 mph (768.60 kph):
The North American Eagle team website reports: “To date, we have made over 57 test runs, already attaining a top speed of 515 mph. This is only the beginning though. In September 2018, with Jessi Combs at the helm, she made a 483.227 mph (run). In 2019 she will attempt (to exceed) the 512 mph Fastest Woman record, as well as the single engine speed record. Both of these are major milestones on the road to 800 mph.”
Founder Ed Shadle died on 7 September 2018. Jessi Combs is now the primary driver and the team is expecting to continue its LSR program in 2019.
3. Category A LSR contenders in 2018
At the beginning of 2018, the FIA land speed record for wheel-driven, piston-powered vehicles was held by Speed Demon, which set the record on 17 September 2012:
439.024 mph (706.540 kph) for the measured mile, and
439.562 mph (707.408) kph for the measured kilometer
The FIA record for wheel-driven, turbine-powered vehicles was held by Turbinator, which set the record on 18 October 2001:
458.444 mph (737.794 kph) for the measured mile, and
458.196 mph (737.395 kph) for the measured kilometer
2018 was an exciting year in Category A, with the two primary Category A LSR contenders, Challenger 2 and Turbinator II, raising their respective speed records for wheel-driven vehicles and Turbinator II making the first unofficial Category A one-way run at > 500 mph (805 kph). Five different LSR vehicles made runs at > 400 mph (644 kph) during the SCTA Bonneville Speed Week, which was held from 11 – 17 August 2018:
Challenger 2
Turbinator II
Speed Demon
Flashpoint
Carbiliner
At the rain foreshortened Bonneville World Finals held on 2 October 2018, the following three LSR vehicles made runs at > 400 mph (644 kph):
Turbinator II
Speed Demon
Eddie’s Chop Shop streamliner
Following is a brief review of these Category A LSR programs.
You’ll find the complete results from Speed Week 2018, World Finals 2018 and other SCTA events on their website:
Challenger 2 – Raised the wheel-driven, piston engine LSR in 2018
On 9 September 1960, Mickey Thompson, driving the four-engine, wheel-driven Challenger 1 streamliner, achieved a one-way speed of 406.60 mph (654.36 kph) in the flying mile on the Bonneville Salt Flats. Unfortunately, Challenger 1 was was unable to make the second run required by the FIA for an official land speed record. Thus, the existing absolute and Category A LSRs set on 16 September 1947 by John Cobb driving the Railton Mobile Express continued to stand at 394.19 mph (634.39 kph) for the measured mile and 394.196 mph (643.196 kph) for the measured kilometer.
Cobb’s absolute LSR was eclipsed on 5 August 1963 by Craig Breedlove, driving the turbojet-powered (Category C, not wheel-driven) Spirit of America to a speed of 407.447 mph (655.722 kph) in the measured mile on the Bonneville Salt Flats.
The following year, Cobb’s wheel-driven LSR was further eroded on 17 July 1964 when Donald Campbell set a Category A record of 403.10 mph (648.73 km/h) in the measured mile in the wheel-driven, Proteus gas turbine-powered Bluebird CN7 on the dry salt bed at Lake Eyre, Australia.
Cobb’s wheel-driven, piston engine LSR record and Campbell’s wheel-driven LSR both fell on 12 November 1965 when Bob Summers drove the four-engine Goldenrod LSR car to 409.277 mph (658.526 kph) in the measured mile on the Bonneville Salt Flats. By then, several turbojet-powered Category C LSR vehicles and had raised the absolute LSR to more than 555 mph (893 kph).
In an effort to regain the Category A LSR crown, Mickey Thompson built the greatly improved Challenger 2 for a planned LSR challenge in 1968. The unblown (not supercharged), two-engine Challenger 2 ran at the Bonneville Salt Flats in 1968 with trial speeds approaching 400 mph (644 kph), but rain prevented an LSR run that year. Following the loss of key LSR sponsors in 1969, Mickey Thompson mothballed the Challenger 2 for almost two decades.
Mickey Thompson and son Danny removed Challenger 2 from storage in January 1988 and developed plans for a 1989 LSR challenge. These plans were cancelled following the tragic murder of Mickey Thompson and his wife in March 1988. Once again, Challenger 2 was placed in long-term storage. In 2010, Danny Thompson began efforts to prepare Challenger 2 for an LSR run intended to “vindicate his father’s faith in the streamliner.” The modernized Challenger 2 retained the original chassis and hand-formed aluminum skin, resulting in an almost unchanged external appearance. The original engines and drive trains were removed and replaced by more powerful dry block, nitromethane-fueled, unblown Hemi V8 engines in an all-wheel drive configuration. Other modifications were made to comply with current FIA and SCTA regulations for LSR attempts. You’ll find details on the updated Challenger 2 on the Thompson LSR website here:
Challenger 2 test runs started in June 2014 and speed runs on Bonneville’s full-length course began in September 2014.
On 12 August 2018, during Bonneville Speed Week and 50 years after its original runs at Bonneville, Challenger 2 driven by Danny Thompson set a new class record of 448.757 mph (772.204 kph) for the measured mile, breaking the record held by Speed Demon since September 2012. This record currently stands as the fastest overall wheel-driven, piston-powered land speed record. You can view a YouTube video on the Challenger racing team and the 2018 LSR run here:
Challenger 2. Source: http://thompsonlsr.com
The Challenger 2 is now retired. Thank you Danny Thompson for resurrecting this amazing car and mounting a successful LSR challenge. Your Dad, Mickey Thompson, would be very proud of you and your team.
Turbinator II – Raised the wheel-driven vehicle LSR record in 2018
Team Vesco has been a long-time contender in land speed record racing. You’ll find a history of and their many projects and LSR challenges on the team website here:
Team Vesco introduced the original Turbinator to the public in 1996 with the goals of setting a new wheel-driven LSR and becoming the first wheel-driven vehicle to exceed 500 mph. Turbinator was powered by a single, stock 3,750 hp Lycoming T55 gas turbine engine (a former turboshaft helicopter engine) delivering power to a four-wheel drive system. On 18 October 2001, the Turbinator, driven by Don Vesco, eclipsed Donald Campbell’s 37-year old land speed record, raising the FIA Category A LSR to 458.440 mph (737.788 kph).
A 2011 paper in the University of Leicester (UK) Journal of Physics Special Topics, by Back, Brown, Hall and Turner, estimated the top speeds of the Turbinator to be 486 mph (782 kph) and its follow-on, the Turbinator II with a 4,400 hp engine, to be 509 mph (819 kph). You can read this paper here:
Turbinator II is an update of the original Turbinator, using an uprated Lycoming gas turbine delivering somewhere between 4,300 – 5,000 hp power to all four wheels. You can see what a high speed run in Turbinator II looks like in the following video made on 13 August 2018 when driver Dave Spangler raised the fastest mile speed to 463.038 mph (745.187 kph) during Bonneville Speed Week.
Just six weeks after Danny Thompson raised the LSR for wheel-driven, piston-engine vehicles to 448.757 mph (772.204 kph) with Challenger 2, Team Vesco raised the wheel-driven vehicle National class record to 482.646 mph (776.743 kph) on 15 September 2018 with Dave Spangler driving Turbinator II at the Bonneville World of Speed time trials hosted by the Utah Salt Flats Racing Association (USFRA).
Source: https://autoweek.com/
Read more about this Turbinator II LSR record for wheel-driven vehicles at:
At the Bonneville World Finals on 2 October 2018, Turbinator II made a one-way run through the measured mile of 493.996 mph (795.009 kph), with an exit speed of 503.332 mph (810.034 kph). Turbinator II became the world’s first wheel-driven vehicle to exceed 500 mph and 800 kph. Weather precluded making the second run needed for an official record. You can view this speed run here:
With continuing improvements being made to the vehicle, Turbinator II appears to be a good candidate for being the first LSR vehicle to set an FIA land speed record at > 500 mph.
Speed Demon
On 17 September 2012, Speed Demon, driven by George Poteet at Bonneville, established an FIA Category A land speed record of 439.024 mph (706.540 kph) for the measured mile and 439.562 mph (707.408 kph) for the measured kilometer. For this record run, Speed Demon was powered by a turbocharged, 2,200 hp, 368 cubic inch small block Chevy engine driving the rear wheels. This record stood until 12 August 2018 when it was eclipsed by Danny Thompson in the Challenger 2.
The original Speed Demon was destroyed on 12 September 2014 after a crash at 375 mph (606 kph) during a speed run at Bonneville, possibly due to a temporary loss of traction on the salt track. You can read a synopsis of George Poteet’s recollection of this crash here:
In an all-new Speed Demon II, George Poteet returned to land speed racing in 2016. The new Speed Demon is powered by a single, twin-turbocharged, small-block V8 engine delivering over 2,600 hp to the rear wheels. You’ll find details on Speed Demon’s V8 piston engine here:
Flashpoint streamliner made its debut on the Bonneville Salt Flats in 2013. It is powered by a 482 cubic inch, nitromethane burning blown Hemi V8. In its 2013 debut, the streamliner achieved a top speed of 395 mph (636 kph). The team has announced a goal of exceeding 500 mph (805 kph).
The Flashpoint team homepage is at the following Facebook site:
On 16 September 2018, during the USFRA World of Speed at Bonneville, the Flashpoint Streamliner achieved a speed of 436.308 mph (702.170 kph) on its first run of the five-mile long course, with an exit speed of 451.197 mph (726.131 kph). On the second run, a tire failed at 427 mph (687 kph), causing a spectacular rollover crash. Fortunately (and incredibly), driver Robert Dalton was uninjured.
Source: Murilee Martin/AutoweekAftermath of the crash. Source: TheDrive
You can read more about the crash at the following link:
Hopefully, the Flashpoint team will rebuild and we’ll see the next iteration of the potent Flashpoint Streamliner back in action in the future.
Carbinite LSR streamliner (Carbiliner)
Source, both photos above: Carbinite LSR
The Carbiliner was designed and built over a seven-year period and made its first appearance at the Bonneville Speed Week in 2016. It is a radically designed Category A streamliner, similar in design to successful Category C jet- and rocket-powered LSR vehicles from the early 1970s. The Carbininte LSR team notes:
“Past efforts and current mindset in building Streamliners has focused on keeping the car aerodynamically neutral (no lift or downforce). This necessitates the addition of significant amounts of ballast to obtain enough traction for acceleration, resulting in two problems:
The racing surface at Bonneville is not as flat as it once was due to deterioration of the salt. This causes the car to skip across the salt at higher speeds, breaking traction.
The increased weight of the cars leads to slower acceleration. Cars may run out of track prior to reaching maximum speed.
The Carbinite LSR Streamliner design has addressed these problems.”
On means is through the use of active aerodynamic control surfaces on the rear wings (NACA 66-018 profile) that support the rear wheels and house the drive shafts. The control surfaces are designed to generate over 3,000 pounds (1,361 kg) of downforce with minimum drag. At low speed, the aerodynamic control surfaces are “full-up” at the start of acceleration. As speed increases, the flaps are lowered to maintain the same amount of downforce. The flaps, speed-based boost control and fuel injection are managed by a Holley engine control unit (ECU).
Source, both photos above: https://www.carbinitelsr.com/index.htmlNote the aero surfaces in the up position at the start of the run. Source: screenshot from video at https://www.youtube.com/watch?v=LQSt4ULIje0
The Carbiliner is powered by a single, twin-turbocharged, 540 cubic inch Chevy V8 burning methanol (starting in 2017) and delivering 2,400 – 2,800 hp to the the unsprung (no suspension) rear wheels. You’ll find a good technical description of the vehicle here:
The team’s primary goal is “to break the 500 mph barrier at the next Bonneville Speed Week and become the fastest wheel driven car on the planet”. In 2018, it was one of five LSR vehicles to exceed 400 mph during Speed Week, making runs of 406.750 mph (654.601 kph) and 413.542 mph (665.531 kph). The team has work to do, but this radical LSR may have the potential to achieve their primary goal.
Source: Popular Mechanics, https://www.popularmechanics.com/
You’ll find more information on the Carbinite LSR team home page is here:
Like the Bloodhound SSC project, the Carbinite LSR team has established an education program “to excite the next generation of students about careers in STEM, and to inspire students to think big! Our program is geared for high school physics and shop students, as well as college engineering students.” You’ll find a good video describing the Carbiliner’s aerodynamics and the STEM education program here:
Eddie’s Chop Shop streamliner
Ed Umland, of Orangevale, CA, reportedly built his 29-foot blown gas, aluminum bodied streamliner in 18 months with the goal of being able to exceed 400 mph at Bonneville. The streamliner is powered by a single, twin-turbo, 439 cubic inch V8 engine driving the rear wheels.
Source: Eddie’s Chop Shop
On 2 October 2018, during the foreshortened Bonneville World Finals, this streamliner achieved a speed of 403.996 mph (650.169 kph) in the measured mile, with an exit speed of 411.209 mph (661.777 kph). Ed Umland has achieved his original goal, and his streamliner appears to have the potential to achieve higher speeds in the future.
The upper echelon of land speed racing is alive and well, in spite of the likely demise of the Category C Bloodhound SSC program. There is great competition among the Category A wheel-driven LSR contenders in the 400 – 500 mph range, with records being raised in 2018 and the 500 mph and 800 kph “barriers” being broken for the first time. Next year should be pretty interesting, especially if the salt flats are in good condition.
I hope the Bloodhound SSC program will get a last-minute (last second) reprieve and, as in the 1975 movie Monty Python and the Holy Grail, be able to say, “I’m not dead yet.”
25 December 2018 Christmas Day Update: Yes, Virginia, there is a Santa Claus.
On Monday 17th December, the Bloodhound Project announced that its business and assets were bought by Yorkshire-based entrepreneur Ian Warhurst, who stated: “I am delighted to have been able to safeguard the business and assets, preventing the project breakup. I know how important it is to inspire young people about science, technology, engineering and math, and I want to ensure BLOODHOUND can continue doing that into the future.”
Thank you Ian Warhurst for your Christmas gift to the Bloodhound Team and the land speed racing community.
My 31 January 2015 post, “Flow Cell Battery Technology Being Tested as an Automotive Power Source,” addressed flow cell battery (also known as redox flow cell battery) technology being applied by the Swiss firm nanoFlowcell AG for use in automotive all-electric power plants. The operating principles of their nanoFlowcell® battery are discussed here:
This flow cell battery doesn’t use rare or hard-to-recycle raw materials and is refueled by adding “bi-ION” aqueous electrolytes that are “neither toxic nor harmful to the environment and neither flammable nor explosive.” Water vapor is the only “exhaust gas” generated by a nanoFlowcell®.
The e-Sportlimousine and the QUANT FE cars successfully demonstrated a high-voltage electric power automotive application of nanoFlowcell® technology.
Since my 2015 post, flow cell batteries have not made significant inroads as an automotive power source, however, the firm now named nanoFlowcell Holdings remains the leader in automotive applications of this battery technology. You can get an update on their current low-voltage (48 volt) automotive flow cell battery technology and two very stylish cars, the QUANT 48VOLT and the QUANTiNO, at the following link:
In contrast to most other electric car manufacturers, nanoFlowcell Holdings has adopted a low voltage (48 volt) electric power system for which it claims the following significant benefits.
“The intrinsic safety of the nanoFlowcell® means its poles can be touched without danger to life and limb. In contrast to conventional lithium-ion battery systems, there is no risk of an electric shock to road users or first responders even in the event of a serious accident. Thermal runaway, as can occur with lithium-ion batteries and lead to the vehicle catching fire, is not structurally possible with a nanoFlowcell® 48VOLT drive. The bi-ION electrolyte liquid – the liquid “fuel” of the nanoFlowcell® – is neither flammable nor explosive. Furthermore, the electrolyte solution is in no way harmful to health or the environment. Even in the worst-case scenario, no danger could possibly arise from either the nanoFlowcell® 48VOLT low-voltage drive or the bi-ION electrolyte solution.”
In comparison, the more conventional lithium-ion battery systems in the Tesla, Nissan Leaf and BMW i3 electric cars typically operate in the 355 – 375 volt range and the Toyota Mirai hydrogen fuel cell electric power system operates at about 650 volts.
In the high-performance QUANT 48VOLT “supercar,” the low-voltage application of flow cell technology delivers extreme performance [560 kW (751 hp), 300 km/h (186 mph) top speed] and commendable range [ >1,000 kilometers (621 miles)]. The car’s four-wheel drive system is comprised of four 140 kW (188 hp), 45-phase, low-voltage motors and has been optimized to minimize the volume and weight of the power system relative to the previous high-voltage systems in the e-Sportlimousine and QUANT FE.
The smaller QUANTiNO is designed as a practical “every day driver.” You can read about a 2016 road test in Switzerland, which covered 1,167 km (725 miles) without refueling, at the following link:
A version of the QUANTiNO without supercapacitors currently is being tested. In this version, the energy for the electric motors comes directly from the flow cell battery, without any buffer storage in between. These tests are intended to refine the battery management system (BMS) and demonstrate the practicality of an even simpler, but lower performance, 48-volt power system.
Both the QUANT 48VOLT and QUANTiNO were represented at the 2017 Geneva Auto Show.
QUANT 48VOLT (left) and QUANTiNO (right). Source: nanoFlowcell Holdings.
You can read more about these cars at this auto show at the following link:
I think the automotive applications of flow cell battery technology look very promising, particularly with the long driving range possible with these batteries, the low environmental impact of the electrolytes, and the inherent safety of the low-voltage power system. I wouldn’t mind having a QUANT 48VOLT or QUANTiNO in my garage, as long as I could refuel at the end of a long trip.
Electrical utility-scale applications of flow cell batteries
In my 4 March 2016 post, “Dispatchable Power from Energy Storage Systems Help Maintain Grid Stability,” I noted that the reason we need dispatchable grid storage systems is because of the proliferation of grid-connected intermittent generators and the need for grid operators to manage grid stability regionally and across the nation. I also noted that battery storage is only one of several technologies available for grid-connected energy storage systems.
Flow cell battery technology has entered the market as a utility-scale energy storage / power system that offers some advantages over more conventional battery storage systems, such as the sodium-sulfur (NaS) battery system offered by Mitsubishi, the lithium-ion battery systems currently dominating this market, offered by GS Yuasa International Ltd. (system supplied by Mitsubishi), LG Chem, Tesla, and others, and the lithium iron phosphate (LiFePO4) battery system being tested in California’s GridSaverTM program. Flow cell battery advantages include:
Flow cell batteries have no “memory effect” and are capable of more than 10,000 “charge cycles”. In comparison, the lifetime of lead-acid batteries is about 500 charge cycles and lithium-ion battery lifetime is about 1,000 charge cycles. While a 1,000 charge cycle lifetime may be adequate for automotive applications, this relatively short battery lifetime will require an inordinate number of battery replacements during the operating lifetime of a utility-scale, grid-connected energy storage system.
The energy converter (the flow cell) and the energy storage medium (the electrolyte) are separate. The amount of energy stored is not dependent on the size of the battery cell, as it is for conventional battery systems. This allows better storage system scalability and optimization in terms of maximum power output (i.e., MW) vs. energy storage (i.e., MWh).
No risk of thermal runaway, as may occur in lithium-ion battery systems
The firm UniEnergy Technologies (UET) offers two modular energy storage systems based on flow cell battery technology: ReFlex and the much larger Uni.System™, which can be applied in utility-scale dispatchable power systems. UET describes the Uni.System™ as follows:
“Each Uni.System™ delivers 600kW power and 2.2MWh maximum energy in a compact footprint of only five 20’ containers. Designed to be modular, multiple Uni.System can be deployed and operated with a density of more than 20 MW per acre, and 40 MW per acre if the containers are double-stacked.”
One Uni.System™ module. Source: UET
You can read more on the Uni.System™ at the following link:
The website Global Energy World reported that UET recently installed a 2 MW / 8 MWh vanadium flow battery system at a Snohomish Public Utility District (PUD) substation near Everett, Wash. This installation was one of five different energy storage projects awarded matching grants in 2014 through the state’s Clean Energy Fund. See the short article at the following link:
Snohomish PUD concurrently is operating a modular, smaller (1 MW / 0.5 MWh) lithium ion battery energy storage installation. The PUD explains:
“The utility is managing its energy storage projects with an Energy Storage Optimizer (ESO), a software platform that runs in its control center and maximizes the economics of its projects by matching energy assets to the most valuable mix of options on a day-ahead, hour-ahead and real-time basis.”
You can read more about these Snohomish PUD energy storage systems at the following link:
The design of both Snohomish PUD systems are based on the Modular Energy Storage Architecture (MESA), which is described as, “an open, non-proprietary set of specifications and standards developed by an industry consortium of electric utilities and technology suppliers. Through standardization, MESA accelerates interoperability, scalability, safety, quality, availability, and affordability in energy storage components and systems.” You’ll find more information on MESA standards here:
The BLOODHOUND Project bills itself as an international education initiative focused around a 1,000 mph World Land Speed Record attempt.
“The primary objective of the Project is to inspire the next generation to pursue careers in science, engineering, technology and math – by demonstrating how they can be harnessed to achieve the impossible, such as a jet and rocket powered car capable of setting a new World Land Speed Record.”
Since my first post in the BLOODHOUND Project on 2 March 2015, the project team has made great progress in designing, developing, constructing and testing the BLOODHOUND SSC (supersonic car) and its many components and systems. This will be a very interesting year as the BLOODHOUND Project works up to a world land speed record attempt currently planned for November 2017 on Hakskeen Pan in South Africa.
You’ll find the BLOODHOUND website, with its many resources, at the following link:
The project team has established an extensive video record of their work on YouTube. Starting at their YouTube home page at the following link, you can navigate through a very interesting video library.
On 9 January 2017, the BLOODHOUND Project announced that they had launched a new series of short video programs that will take viewers through the inner workings of the land speed record car. The first video in the Anatomy of the Car series is at the following link:
You can subscribe to the BLOODHOUND videos directly on their YouTube home page.
I hope you will share my enthusiasm for this inspirational international project and take time to understand the remarkable systems integration work being done by the BLOODHOUND Project.
Venturi Buckeye Bullet-3 (VBB-3) is an all-electric, four wheel drive, land speed record (LSR) car that has been designed to exceed 400 mph (643.7 km/h). The organizations involved in this project are:
Venturi Automobiles:
This Monaco-based company is a leader in the field of high performance electric vehicles. Read more at the Venturi website at the following link:
Ohio State University (OSU) Center for Automotive Research (CAR):
OSU’s CAR has been engaged in all-electric LSR development and testing since 2000. On 3 October 2004 at the Bonneville Salt Flats in Utah, the original nickel-metal hydride (NiMH) battery-powered Buckeye Bullet reached a top speed of 321.834 mph (517.942 km/h).
In an on-going program known as Mission 01, started in 2009, OSU partnered with Venturi to develop, test, and conduct the land speed record runs of the hydrogen fuel cell-powered VBB-2, the battery-powered VBB-2.5, and the more powerful battery-powered VBB-3. Read more at the OSU / CAR website at following link:
The Venturi – OSU team’s accomplishments to date are:
2009: The team’s first world land speed record was achieved on the Bonneville Salt Flats with hydrogen fuel cell-powered VBB-2 at 303 mph (487 km/h).
2010: The team returned to the salt flats with the 700 hp lithium-ion battery powered VBB-2.5 which set another world record at 307 mph (495 km/h); with a top speed at 320 mph (515 km/h).
2013: The 3,000 hp lithium iron phosphate battery-powered VBB-3 was unveiled. Due to the flooding of the Bonneville Salt Flats, the FIA and the organizers of the world speed records program cancelled the 2013 competition.
2014: Poor track conditions at Bonneville persisted after flooding from a summer storm. Abbreviated test runs by VBB-3 yielded a world record in its category (electric vehicle over 3.5 metric tons) with an average speed of 212 mph (341 km/h) and a top speed of 270 mph (435 km/h).
2015: Poor track conditions at Bonneville persisted after flooding from a summer storm. Abbreviated test runs by VBB-3 yielded a world record in its category (electric vehicle over 3.5 metric tons) with an average speed of 212 mph (341 km/h) and a top speed of 270 mph (435 km/h).
You will find a comparison of the VBB-2, VBB-2.5 and VBB-3 vehicles at the following link:
VBB-3 has a 37.2 ft. (11.35 meter) long, slender, space frame chassis that houses eight battery packs with a total of 2,000 cells, two 1,500 hp AC induction motors developed by Venturi for driving the front and rear wheels, a coolant system for the power electronics, disc brakes and a braking parachute, and a small cockpit for the driver. The basic internal arrangement of these components in the VBB-3 chassis is shown in the following diagram.
Source: Venturi
You can see a short video of a test drive of VBB-3 without its external skin at the following link:
VBB-3 currently is being prepared in the OSU / CAR workshop in Columbus, Ohio, for another attempt at the land speed record in summer 2016. A team of about 25 engineers and students are planning to be at the Bonneville Salt Flats in summer 2016 with the goal of surpassing 372 mph (600 km/h).
You can subscribe to Venturi new releases on VBB-3 at the following link:
Update 2 January 2017: VBB-3 sets new EV land speed record
On 19 September 2016, VBB-3 set an electric vehicle (Category A Group VIII Class 8) land-speed record of 341.4 mph (549 kph), during a two-way run within one hour on the Bonneville salt flats in Utah. You can read the OSU announcement at the following link:
Certification of this EV speed record by the Federation Internationale de l’Automobile’s (FIA) is still pending.
The Venturi-OSU team believes VBB-3 has the capability to achieve 435 mph (700 kph) in the right conditions, so we can expect more record attempts in the future.