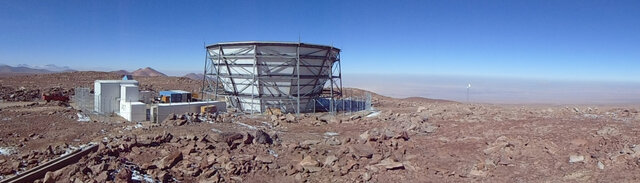
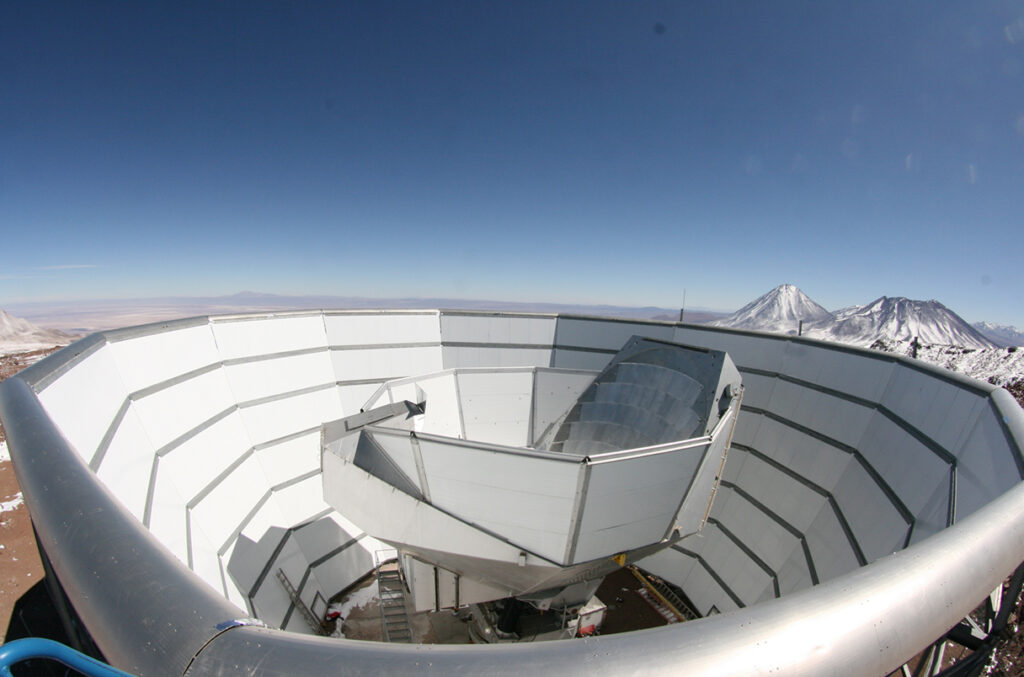
The Atacama Cosmology Telescope (ACT), is a microwave wavelength telescope located in the Atacama Desert in Chile, at an altitude of 5,190 meters (17,030 ft), making it one of the highest ground-based telescopes in the world. ACT took its final data in 2022 and has since been decommissioned.
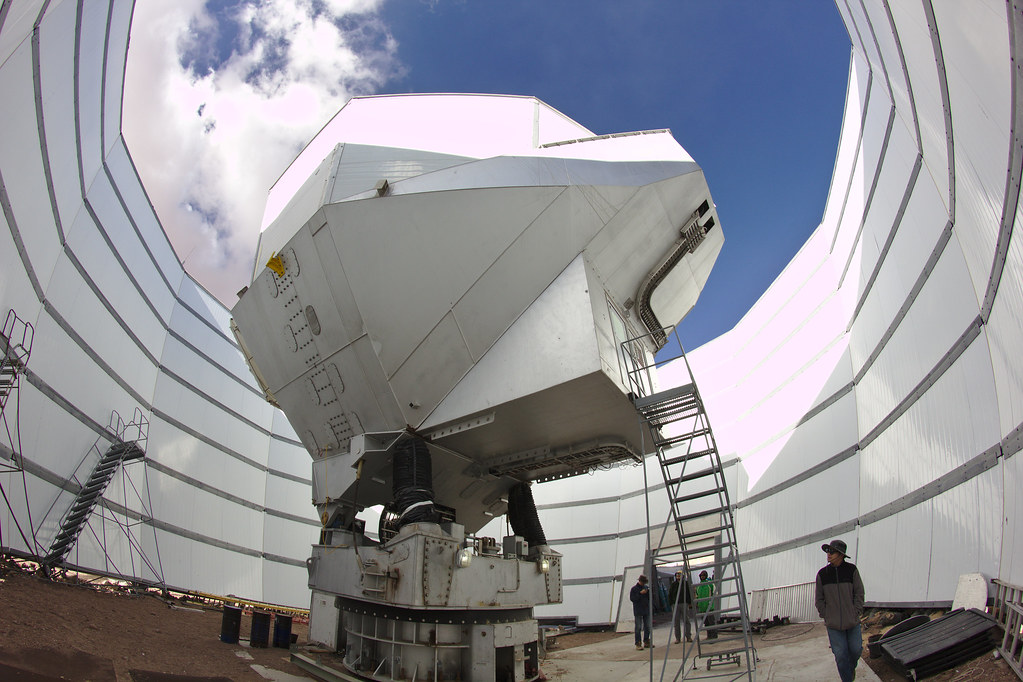
Atacama Cosmology Telescope. Sources: (top) NDRIO White Paper, A. Hicks, 2020, (middle) Wikipedia, (bottom) flickr
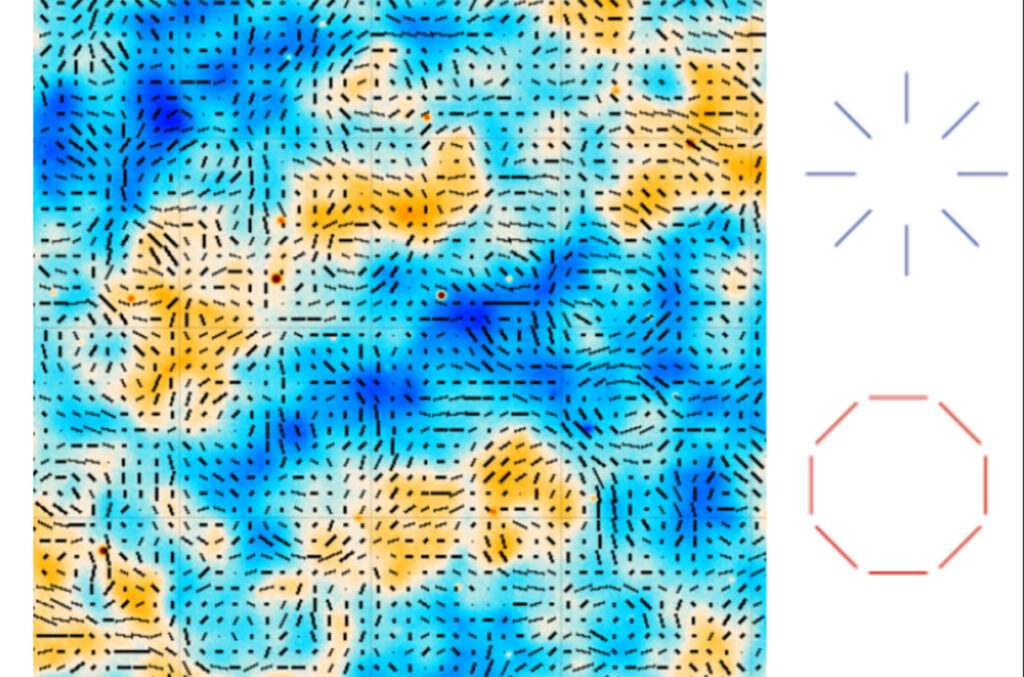
The Atacama Cosmology Telescope (ACT) Collaboration posted new maps of the cosmic microwave background (CMB) radiation based on the final data collected with the Advanced ACT camera over the period 2017–2022. The CMB is the light released from the primordial universe as atoms first started forming and space became transparent, approximately 380,000 years after the Big Bang. The new maps cover 19,000 square degrees, almost one-half of the total area of the celestial sphere, which measures about 41,253 square degrees.
The above detail from the new ACT map of the CMB radiation shows how polarization reveals the movement of primordial gases. Source: ACT Collaboration
For more information on the new ACT maps, see the following article in Science:
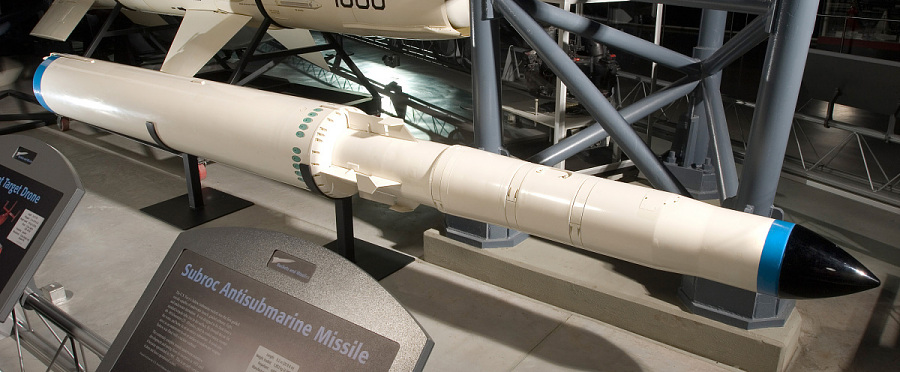
The UUM-44 SUBROC (SUBmarine-launched anti-submarine ROCket) was a 22 ft (6.7 m) long, inertially-guided, long-range weapon that consisted of a solid fuel booster rocket with a W55 thermonuclear depth charge warhead.
SUBROC on display at the Smithsonian Air & Space Museum annex, Udvar-Hazy Center. Source: National Air & Space Museum
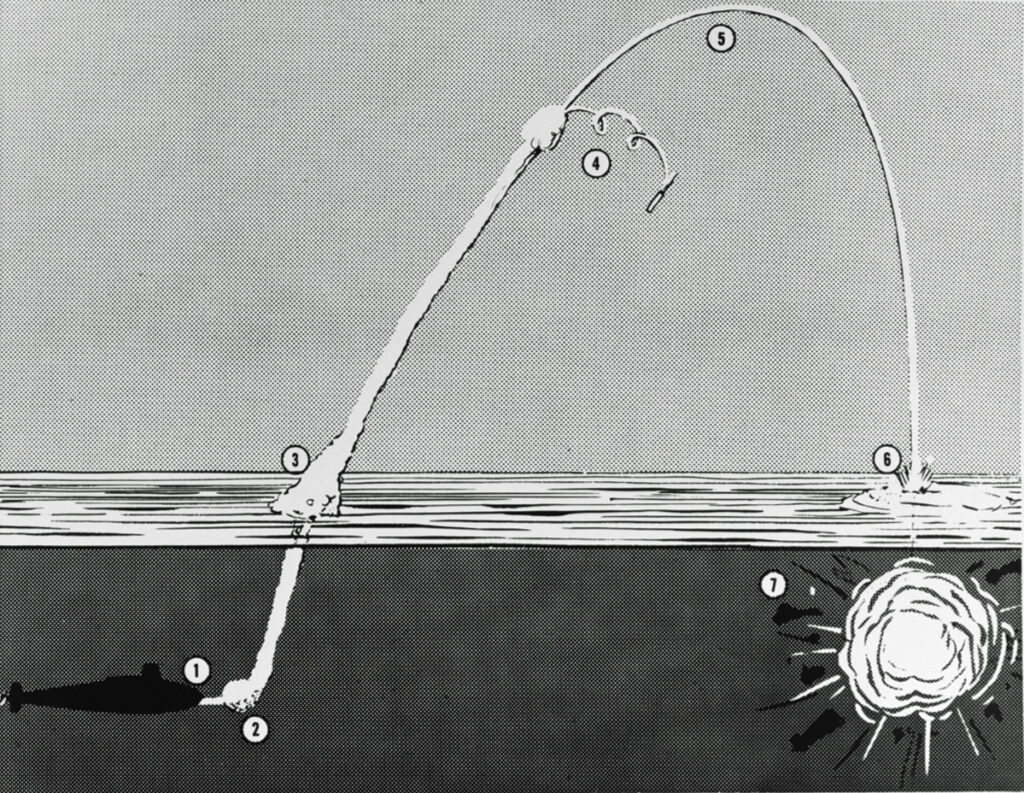
As shown in the following diagram, SUBROC was launched horizontally from a standard submarine 21 in (533 mm) diameter torpedo tube. When the missile surfaced, the booster rocket ignited and flew toward the target. The warhead separated when the booster was expended and then flew a ballistic trajectory to the target area, where it re-entered the water and detonated at a prescribed depth.
SUBROC mission profile. Source: US NavySUBROC launch. Source: US Navy
The SUBROC had a range reported in various sources from 25 – 50 miles (40.2 – 80.5 km), roughly bracketing the range from the launching submarine to a deep water target in the first convergence zone. This deep water acoustic phenomena focuses sound from a distant target at specific distances (convergence zones), depending on a variety of hydrographic conditions, and can permit passive detection of a surface or submerged target at much longer ranges than are possible by a direct path.
Development by Goodyear Aerospace began in 1958, technical evaluation was completed in 1963, and Initial Operating Capability (IOC) aboard USS Permit (SSN-594) was achieved in 1964.
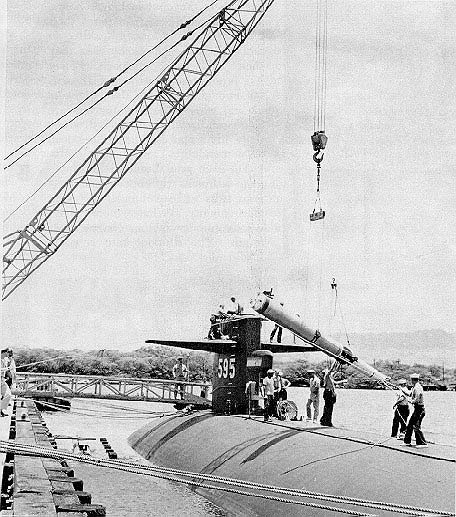
SUBROC loading on USS Plunger (SSN-595). Source: missilery.info
While SUBROC production ended in 1968, the weapon was operational for 25 years, until it was retired from the U.S. submarine fleet in 1989. The National War Memorial Registry preserves a record of a Cold War memorial plaque commemorating the SUBROC at the corner of C Street & 1st Street in Norfolk, VA.
Source: National War Memorial Registry
So what’s the connection between SUBROC and the unique 355-foot (108-meter), non-self-propelled vessel known as the FLoating Instrument Platform (FLIP), which was designed with a rather conventional bow and a long cylindrical hull that could be partially flooded at sea to enable the vessel to float vertically in the water with most of the hull submerged, like a giant spar buoy?
FLIP transitioning from horizontal to vertical. Source: New Atlas
Scripps Institute of Oceanography provides the following answer:
“Research Platform FLIP was developed to provide a stable platform to measure fine-scale fluctuations in phase and amplitude of sound waves for the U.S. Navy SUBROC (SUBmarine ROCket) program. One of the major questions concerned bearing accuracy obtained acoustically out to convergence-zone ranges. Horizontal temperature/salinity gradients in the ocean could introduce bearing errors in the volume of the ocean, and sloping bottoms could do the same for acoustic paths that interacted with the bottom. The Navy needed precise measurements to determine the effect of environmental gradients and fluctuations.
On July 23, 1962, FLIP was tested for the first time in the Dabob Bay area of the Hood Canal in Washington state on the Navy tracking range. After successfully completing trials of the flipping operation, it was towed to San Diego to commence operations in September 1962.
Many years of operations have included deployments in the Pacific as far as Hawaii and one deployment to the Atlantic. While originally intended for acoustic research, it has become a versatile platform for research in upper-ocean physical oceanography, meteorology, geophysics, and biology.”
FLIP’s bow contained the uniquely-equipped habitable spaces that enabled the crew and scientists to work when the ship aligned horizontally or vertically.
A not-so-simple double sink. Source: Scripps Institute of Oceanography
Work platforms when flipped.Source: Scripps Institute of Oceanography
FLIP in the floating dry dock ARCO at Naval Base Point Loma in the 2000s. Source: Scripps Institute of Oceanography
After an operational lifetime of more than 60 years, during which FLIP conducted more than 380 flipping operations, the unique vessel was retired and towed to a dismantling and recycling facility in Mexico in August 2023.
30 October 2024 update:
Fortunately, FLIP has been saved by the UK firm DEEP, which announced in October 2024, “..the rescued platform has made its way from Mexico, through the Panama Canal and across the Atlantic to the Mediterranean, where over the next 12 – 18 months she will be refitted and modernized in France.” You’ll find more information on DEEP’s acquisition of FLIP in the 23 October 2024 DEEP press release and the related USNI article.
For more information on SUBROC and FLIP, check out the following references:
Seventy years ago, the U.S. Atomic Energy Commission (AEC) conducted a series of tests at the National Reactor Testing Station (NRTS, now Idaho National Laboratory) with the Boiling Reactor Experiment (BORAX)-series of reactors. These small test reactors established the engineering foundation for commercial light water-cooled, boiling water reactors (BWRs), which are operating today in many nations around the world.
In June 2024, the American Nuclear Society (ANS) published a brief overview of the BORAX program and reported:
“Prior to 1952, it was thought that boiling in a light water reactor core would result in destructive instabilities. Samuel Untermeyer proposed that reactivity feedbacks from steam formation would instead help to stabilize the chain reaction, and so Argonne (National Laboratory) designed the BORAX series of reactors to investigate the concept.”
You can watch an AEC video on the BORAX-I experiments here. This 19-minute video is notable particularly because it shows BORAX-I operating open-loop (venting steam from the operating boiling water reactor to the atmosphere) and it shows the effects of a series of increasingly severe reactivity transient tests, the last of which was designed to be a destructive test of the BORAX-I reactor.
BORAX-I final test. Source: Argonne
The BORAX-I series of transient tests demonstrated that “the boiling water reactor concept was viable and could be developed into a workable power reactor.”
In addition to BORAX-I, there were four more test reactors in the BORAX-series. All are briefly described on the Argonne National Laboratory website here.
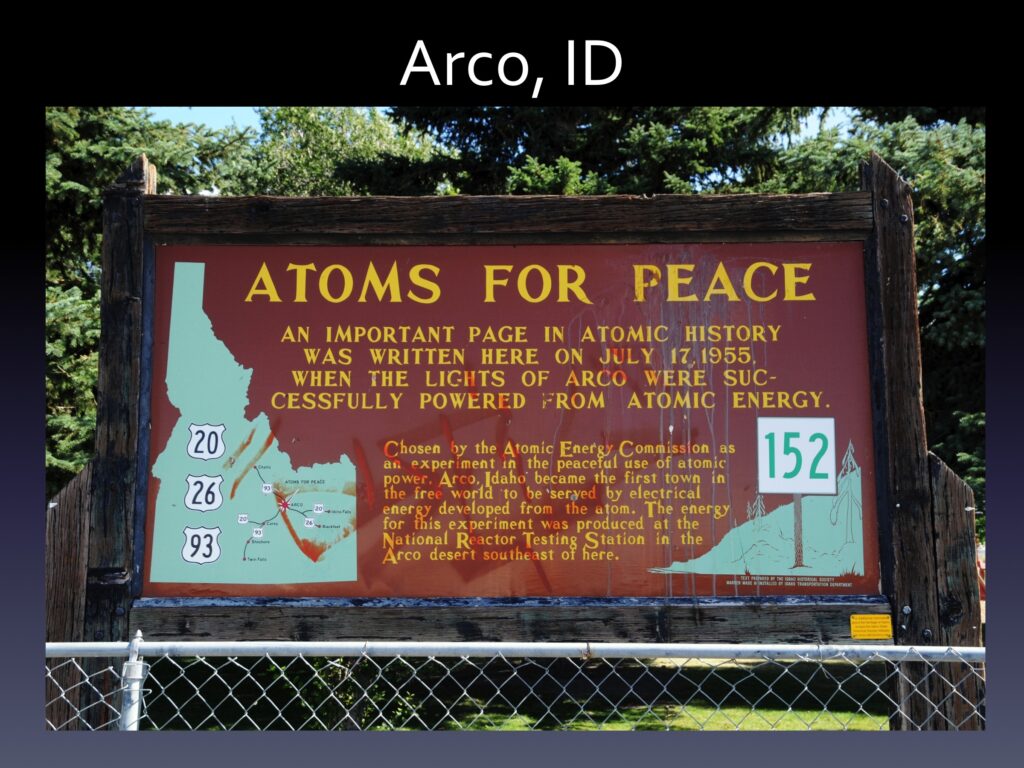
The next test reactor in the BORAX series, BORAX-II, initially operated open-loop. After a steam and power conversion system was added to enable closed-loop operation and up to 2 MWe electric power generation, it was renamed BORAX-III. The town of Arco, Idaho, became the first community in the Nation to receive its entire supply of electric power from a nuclear reactor on 17 July 1955, when BORAX-III was temporarily connected to the local grid. ANL reported 500 kW was used to power the BORAX facility, 1000 kW was used to power the Central Facilities Area at NRTS, and 500 kW was available to power the city of Arco.
Arco commemorative sign. Source: Author photo
BORAX-IV was a closed-loop BWR that operated from 1956 to 1958 and was used primarily to test uranium and thorium oxide fuel and measure the impact of small fuel defects on radioactivity levels in steam plant equipment. ANL concluded, “On the basis of these experiments, it was predicted that a boiling reactor, fueled with ceramic fuel, can safely operate for long periods of time with many fuel cladding defects.”
The last test reactor in the series, BORAX-V, introduced an integral nuclear superheat system, which raised the saturated steam conditions exiting the core to high-pressure, dry steam conditions similar to a conventional (fossil-fueled) superheated steam power plant. This feature was used later in the 17.5 MWe BONUS (Boiling Nuclear Superheat) reactor, which was built under the AEC-sponsored Power Demonstration Reactor Program. BONUS was designed by General Nuclear Engineering Corp. and operated by the Puerto Rico Water Resources Authority from 1965 to 1968. You can watch a 1967 AEC video on the BONUS reactor here.
The boiling nuclear superheat feature demonstrated in BORAX-V was used in one other Power Demonstration Reactor Program reactor, the 203 MWt Pathfinder, which operated from 1962 to 1968. However, this feature was not incorporated into later U.S. commercial BWR designs by General Electric.
The BORAX-series of test reactors was followed by the Experimental Boiling Water Reactor (EBWR), which was built in 1961 at Argonne National Laboratory in Illinois. EBWR was designed for steady-state power operation, initially at 20 MWt (5 MWe). Higher-power steady-state operations were conducted in the 20 to 40 MWt range, with short-term operation at up to 61.7 MWt (limited by feedwater pump capacity). Stable operation of EBWR at 100 MWt was expected to be possible. You’ll find an ANL video overview of the EBWR here.
EBWR. Source: Argonne flickr gallery
In its video, ANL reported,
“Operations with EBWR proved that a direct cycle boiling water reactor system could operate, even at power levels five times its rated heat output, without serious radioactive contamination of the steam turbine. EBWR, sometimes referred to as CP-7, was operated until 1967.
EBWR, operated with a largely plutonium core, provided valuable information on plutonium recycle operation of water reactors—it generated plutonium-based electricity for Argonne’s physical plant in 1966.
When closed down the following year, EBWR had established a reputation as the forerunner of many commercial nuclear energy plants. One of those is the (General Electric-designed) Commonwealth Edison facility at Dresden, IL, which in 1960, became the first privately operated nuclear energy plant.”
You’ll find an overview and comparison of General Electric’s commercial BWR/1 to BWR/6 reactors in report NUREG/CR-5640, which is listed below.
For more information:
BORAX
Ray Ottley Haroldsen, “Overview: How the Borax Reactor Came to Be, Atomic Insights,” (online excerpt from the book, “The Story of the Borax Nuclear Reactor and the EBR-I Meltdown,” ISBN 1566847060, 9781566847063), 2008: https://atomicinsights.com/wp-content/uploads/Borax-Book.pdf
“Preliminary Design and Hazards Report – Boiling Reactor Experiment V (BORAX V),” Argonne National Laboratory, February 1960: https://www.osti.gov/servlets/purl/4135874
EBWR
L. Boing & E. Wimunc, “Design – Development and Operation of the Experimental Boiling-Water Reactor (EBWR) Facility, 1955 – 1967,” Report ANL-91/13, Argonne National Laboratory, November 1990: https://digital.library.unt.edu/ark:/67531/metadc283040/m1/1/
J. Matousek, “Modification of the Experimental Boiling Water Reactor (EBWR) for Higher-Power Operation,” Report ANL-6552, Argonne National Laboratory, April 1962: https://www.osti.gov/servlets/purl/4828653
“Boiling Nuclear Superheat (BONUS) Power Station – Final Summary Design Report,” Report PRWRA-GNEC-6, General Nuclear Engineering Corp. and Puerto Rico Water Resources Authority, 1 May 1962: https://www.osti.gov/servlets/purl/4143826
This article is an update to a similar article I wrote in mid-2015. At that time, California was experiencing a persistent drought and surface water resources and aquifers were being strained by high demand. At that time, there were only five desalination plants operating in California:
Diablo Canyon NPP (seawater) desalination plant in San Luis Obispo county
Cambria Community Services District (brackish water) desalination plant in San Luis Obispo county
Sand City Coastal (brackish seawater) Desalination Plant in Monterey County
WRD Robert W. Goldsworthy Desalter in Torrance
Southern California Edison (seawater) desalination plant on Catalina Island
At that time, several other desalination plants in California were in various stages of development, ranging from construction to reactivation to planning / permitting. This article provides a brief overview of the status of these California plants, and more recent desalination projects in the planning stage in late-2023.
2. California desalination plants in operation in mid-2015
Diablo Canyon nuclear power plant (NPP) desalination plant
In a 9 June 2015 article, Forbes reported on the Diablo Canyon NPP, located on the Pacific coast near San Luis Obispo, CA, and noted that the plant could meet 100% of its own fresh water needs with an onsite reverse osmosis (RO) + ultrafiltration desalination plant that draws seawater from the ocean. At that time, this was the largest desalinization plant operating on the U.S. West coast. The plant has a maximum fresh water production capacity of 1,500,000 gallons/day (1,681 acre-feet/year).
Diablo Canyon NPP. Source: PGE
Desalination plant at Diablo Canyon NPP. Source: PGE
The Forbes article suggested that the Diablo Canyon NPP would be able to help nearby communities that currently were experiencing water shortages during a persistent drought. With additional modular RO units and a pipeline to connect to the public water system, up to 825,000 gallons/day (925 acre-feet/year) fresh water could be delivered for public consumption.
For more information on the Diablo Canyon NPP desalination plant:
Video, “How Diablo Canyon’s desalination plant works,” originally posted by The Tribune in 2015, reposted by The Tribune on 15 July 2022: https://www.youtube.com/watch?v=LVMmGjLXkQo
Cambria Community Services District desalination plant
Also in San Luis Obispo county, this desalination plant began operating in early 2015, providing 223,000 gallons/day (250 acre-feet/year), about 35% of the town’s fresh water needs. The process itself runs a brackish water (mix of freshwater, estuary water, and highly treated sewage wastewater) through three stages of osmosis, eventually injecting treated water into the San Simeon and Santa Rosa Creek aquifers to supply the community with additional potable water. This project makes Cambria one of the first communities in California to recycle sewage wastewater into an eventual drinking-water source.
For more information on the Cambria Community Services District desalination plant:
Sand City Coastal Desalination Plant in Monterey County was the first full-scale brackish seawater desalination facility in the state of California. It became operational in May 2010 and can produce 268,000 gallons/day (300 acre-feet/year).
For more information on the Sand City Coastal desalination plant:
The Goldsworthy Desalter (https://www.wrd.org/wrd-robert-w-goldsworthy-desalter) is a reverse osmosis system commissioned in 2001, and expanded in 2018, to treat 5,000,000 gallons per day of brackish water drawn from the West Coast Groundwater Basin under the City of Torrance and produce potable water for the city water system. The Desalter produces about 30% of the fresh water used by Torrance residents and businesses. The plant is owned by the Water Replenishment District (WRD) and operated by the City of Torrance.
Southern California Edison (SCE) desalination plant on Catalina Island
SCE’s seawater desalination plant on Catalina Island has operated since the 1990s. It can produce 200,000 gallons/day (224 acre-feet/year). During winter months, the water produced by this desalination plant is enough to meet Avalon’s needs. During the summer, the water demand increases to 400,000-500,000 gallons a day, and up to 800,000 gallons a day on peak weekend days.
A second desalination unit, built in partnership with the city of Avalon and Los Angeles County, became operational on December 2015. The new desalination unit is connected to SCE’s original desalination plant and can produce an additional 150,000 gallons of water a day (168 acre-feet/year).
For more information on the SCE desalination plant on Catalina Island:
3. New desalination capacity in California since 2015
Since mid-2015, two additional desalination plants have been placed in operation in California:
Poseidon Resources Corp. Claude “Bud” Lewis desalination plant, Carlsbad, CA
City of Santa Barbara’s Charles E. Meyer desalination plant
Poseidon Resources Corp. Claude “Bud” Lewis desalination plant, Carlsbad, CA
The Poseidon Resources Corp. seawater desalination plant in Carlsbad, CA, (http://carlsbaddesal.com) was completed in November 2015. It was officially dedicated and renamed in honor of former Carlsbad Mayor, Claude “Bud” Lewis, on 14 December 2015, in a public ceremony attended by more than 600 elected officials, community leaders and project partners. A 30-year Water Purchase Agreement is in place between the San Diego County Water Authority and Poseidon Water for the entire output of the plant, which has a design capacity of 50,000,000 gallons/day (56,050 acre-feet/year). This plant is providing about 10% of San Diego county’s fresh water needs. It currently is the largest sea water desalination plant in the western hemisphere.
Claude “Bud” Lewis desalination plant in Carlsbad, CA. Source: screenshot from Dudek video, 2021
For more information on the Claude “Bud” Lewis desalination plant, Carlsbad, CA
City of Santa Barbara’s Charles E. Meyer desalination plant
The city-owned Charles E. Meyer desalination plant in Santa Barbara (https://www.countyofsb.org/2401/Desalination) was completed in 1992 and then mothballed after a short test period. In July 2015, the City Council voted unanimously to reactivate this plant, which has a licensed capacity is 6,691,0000 gallons/day (7,500 acre-feet/year) and can meet about 30% of the city’s fresh water needs. In May 2017, the startup testing at the plant was completed and the City started distributing desalinated water into the City’s water system.
Charles E. Meyer Desalination Plant in Santa Barbara, 2019. Source: Florence Low / California Department of Water Resources
For more information on the Charles E. Meyer desalination plant:
4. Other desalination projects planned in California in mid-2015
In mid-2015, several other desalination projects were in the planning stage, including:
Doheny Ocean desalination project in south Orange County
California American Water (Cal-Am) desalination project in Marina, CA
Poseidon Resources Corp. desalination project in Huntington Beach
Deepwater Desal project at Moss Landing
Since then, some have advanced while others have been withdrawn. Here’s a brief summary of their current status.
Doheny Ocean Desalination Project in south Orange County – approved, under construction
This coastal seawater desalination plant has a design capacity of 15,000,000 gallons/day (16,816 acre-feet/year). The project was unanimously approved by the California Coastal Commission in September 2022. The completion date has slipped from 2020 (original estimate in 2015) to late 2028 or early 2029.
Artist’s rendering of the desalination plant proposed for Doheny Beach. Source: South Coast Water District
For more information on the Doheny Ocean Desalination Project
California American Water (Cal-Am) desalination project in Marina, CA – approved, pre-construction
This seawater distillation plant project was approved by the California Coastal Commission on 17 November 2022 at a capacity of 4,800,000 gallons/day (5,380 acre-feet/year). Cal-Am (https://www.amwater.com/caaw/) plans to have the plant operating by the end of 2027.
For more information on the Cal-Am Marina desalination project:
Poseidon Resources Corp. seawater desalination project, Huntington Beach, CA – withdrawn
This project was in the final phase of permitting and originally was expected to be completed in 2018, with a capacity of 50,000,000 gallons/day. The project was withdrawn in February 2023.
For more information on the Huntington Beach desalination project:
DeepWater Desal project at Moss Landing – withdrawn
DeepWater Desal (https://www.deepwaterdesal.com) originally proposed to build a 8,922,000 gallons/day (10,000 acre-feet/year) seawater desalination plant that would draw water from the Pacific Ocean through an existing underwater pipeline that, in the 1940s, was used to move diesel oil from offshore ships to what is now the gas-fired Dynegy Power Plant. The pipeline has been unused for decades. On 4 June 2021, the National Oceanographic and Atmospheric Administration (NOAA) announced that it was terminating the NEPA process and closing the Project’s permit application because the permit applicant (DeepWater Desal) notified NOAA in May 2020 that the primary scope of the Project changed from desalination to land-based aquaculture.
For more information on the DeepWater Desal project:
The People’s Moss Landing Desalination Project – no significant progress
In 2013, the Moss Landing Commercial Business park, LLC proposed to build a 11,950,0000 gallons/day (13,400 acre-feet/year) saltwater desalination plant using an existing subsurface harbor water intake and pumping station built by Henry Kaiser in the 1950s. A Notice of Preparation of a Draft EIR was filed in June 2015. However, in 2023, it appears that the project is not moving forward.
For more information on the People’s Moss Landing Desal project:
Armstrong Ranch brackish water desalination plant, Marina Coast, CA – no significant progress
Seawater intrusion into the aquifer underlying the Marina Coast area is aggravated by extensive groundwater pumping for local agriculture and residents in marina and Fort Ord. The Armstrong Ranch property, which occupies both sides of Highway 1, sits atop aquifers that are impacted by seawater intrusion. A deep aquifer of clean fresh water underlying the area also is being heavily pumped.
A brackish water desalination plant was proposed for Armstrong Ranch, with a design capacity of 2,409,000 gallons/day (2,700 acre-feet/year). One proposal suggested that 150 acres of the Armstrong Ranch parcel could host enough solar panels to both power the desalination plant and sell back surplus power to the grid.
It appears that there has been no significant action in developing this desalination plant.
For more information on the Armstrong Ranch / Marina Coast desal project:
Water Replenishment District (WRD) of Southern California Construction Project: In Los Angeles County, a project in the City of Torrance will construct a conveyance pipeline to connect an existing well to the existing WRD Robert W. Goldsworthy Desalter system and install a self-cleaning auto-strainer. The project will reduce the community’s reliance on imported water, provide a sustainable local potable water supply, and increase desalinated water production by 1,070,667 gallons/day (1,120-acre feet per year) or approximately enough water for 2,200 households.
Westlands Water District Design Pilot Project: In Fresno County, the project will desalinate brackish groundwater from the westside upper aquifer and use salt-tolerant plants to remove salts from the brine. The project will provide cost-effective, reliable and high-quality water to the district and the communities of Coalinga, Huron and Avenal.
City of Fort Bragg Design Pilot Project: Near the City of Fort Bragg, the project will install an innovative, wave-powered, seawater desalination iceberg buoy to provide potable water to residents. The project will diversify the city’s water supply portfolio, create a locally controlled, sustainable, and carbon-free potable water supply, produce water without grid electricity, and strengthen water resiliency during future droughts.
The bottom line is a sea level rise of 216 feet (65.8 m).
The article includes a link to a short, dramatic 2015 animated video by the same title, posted by Insider Science, which shows the global effects a 216 ft sea level rise. You can watch this video on YouTube here: How Earth Would Look If All The Ice Melted
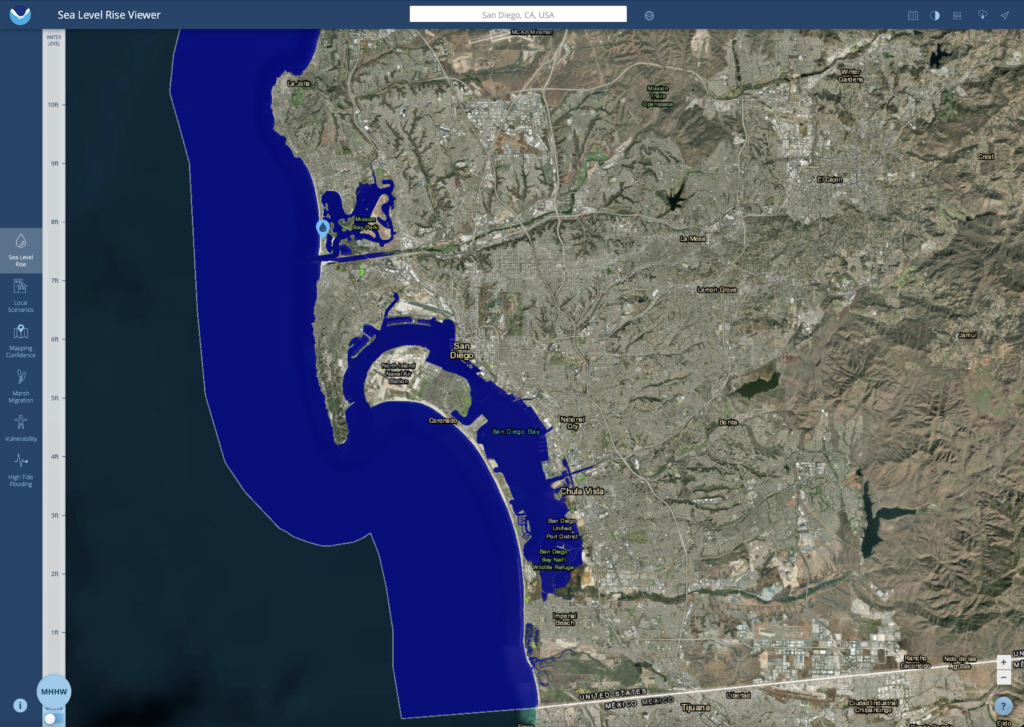
So, what about your neighborhood? You can explore a topographical map of the San Diego area here: https://en-us.topographic-map.com/map-n9tp/San-Diego/. Zoom in to determine the land elevations in specific neighborhoods and find the locations of the 216 ft elevation contour lines.
In the above map, everything in blue would be underwater after a 216 ft sea level rise, including all of Coronado, the Silver Strand, the downtown areas of San Diego, National City and Chula Vista, Lindberg Airport, Pacific Beach, Mission Valley and parts of Point Loma. Ironically, the submarine base near the tip of Point Loma would be underwater.
After you’ve found your house and the houses of families and friends in San Diego, you can expand your topographical search of the whole world. All it takes is a bit of scrolling & zooming. Some countries would be completely underwater.
Thanks to Steve Masten for sending me the link to the Sea Level Rise Viewer developed by the National Oceanographic and Atmospheric Administration (NOAA). With this visualization tool, you can see the gradual effects of sea level rise in coastal USA, up to a maximum rise of 10 feet (3 meters). Below are example results for San Diego, CA.
Current San Diego
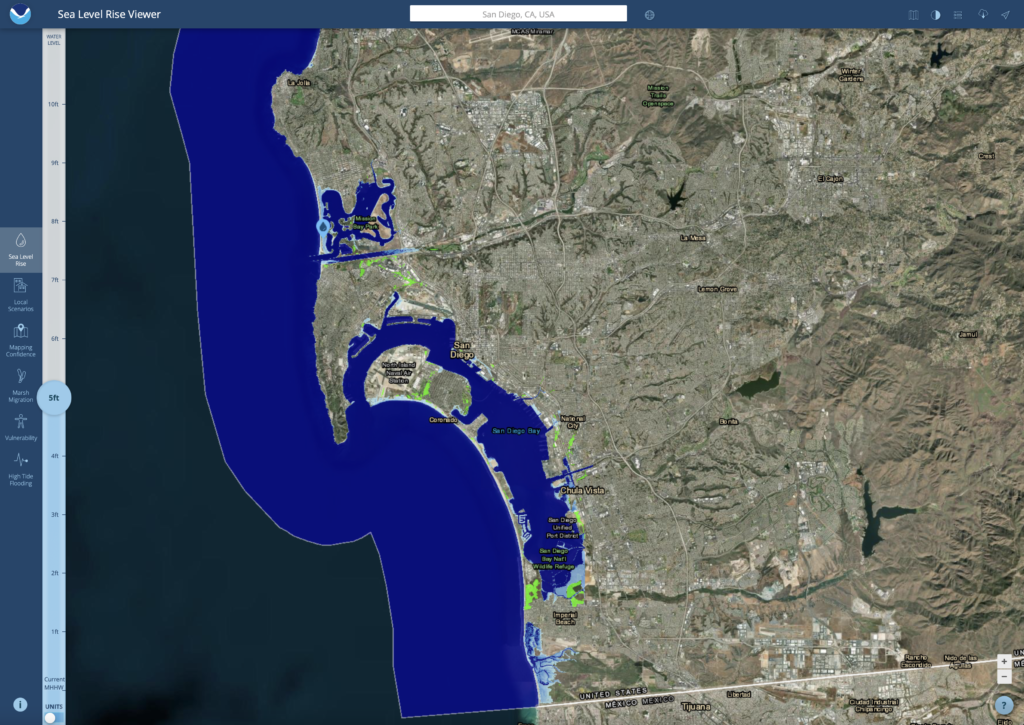
5 foot (1.5 meter) sea level rise
Note the modest impacts in low-lying areas, particularly in South Bay.
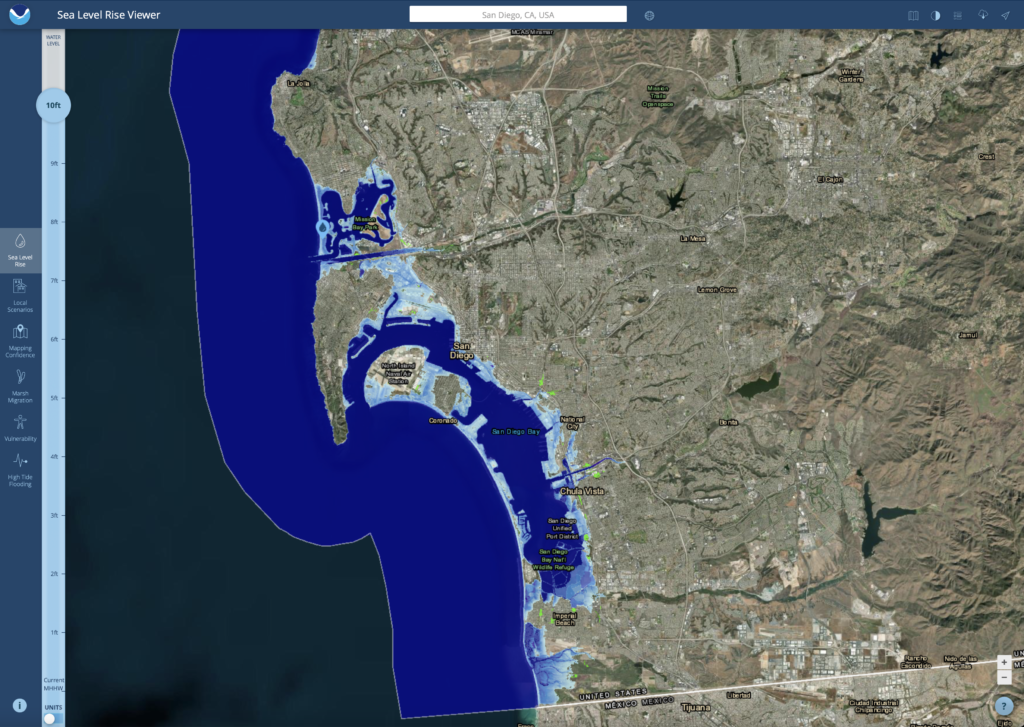
10 foot (3 meter) sea level rise
There are significant flooded areas along the eastern bayfront from downtown San Diego to National City and Chula Vista. The San Diego Airport and Loma Portal are flooded. Coronado becomes two islands and the Silver Strand is underwater, opening the South Bay to the ocean. Point Loma has become an island, and the strand of Mission Beach is underwater, opening Mission Bay to the ocean.
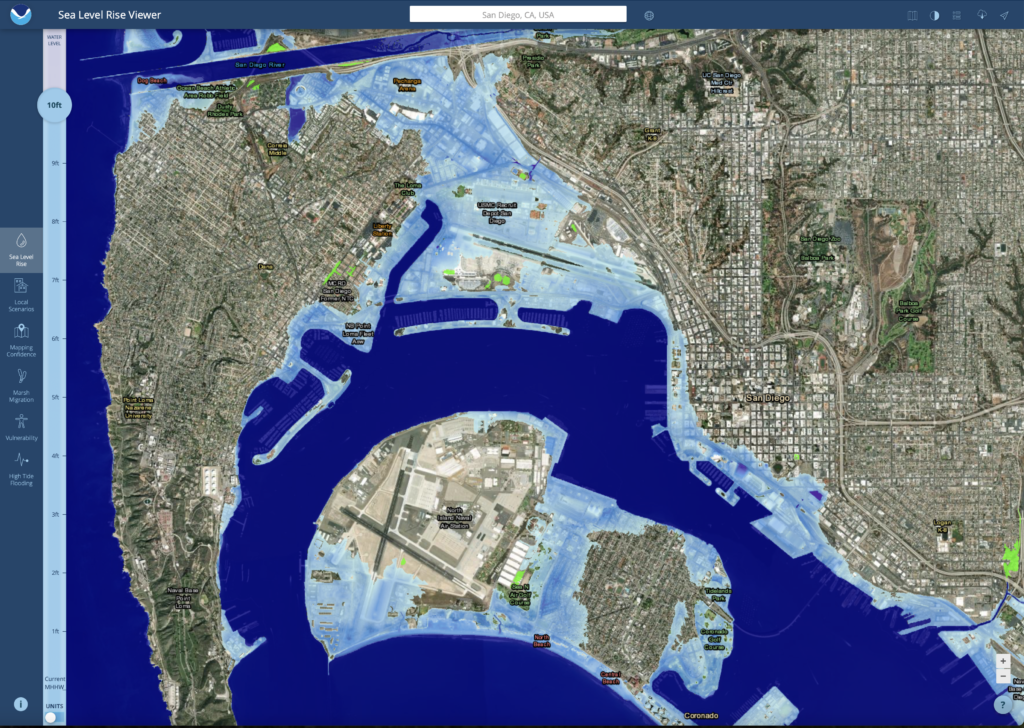
Here’s a closer look at the area around San Diego Bay after a 10 foot sea level rise.
On 9 May 2023, Lockheed Martin announced that its hybrid airship business, including intellectual property and related assets, had been transitioned to a newly formed, commercial company called AT2 Aerospace. The Lockheed Martin press release reported, “AT2 Aerospace, based in Santa Clarita, California, is extending our work to bring hybrid airships to fruition. The AT2 team is developing airship solutions to support commercial and humanitarian applications around the world. Dr. Robert Boyd, retired Lockheed Martin Hybrid Airship program manager, is president and chief operating officer of AT2 Aerospace.”
2. Background on Lockheed Martin’s hybrid airship program
Since the 1980s, Lockheed Martin has been developing several different design approaches for semi-buoyant, hybrid airships with lifting body hulls. That work became focused in Lockheed Martin’s Advanced Development Programs (the Skunk Works) in Palmdale, CA, and produced an extensive series of patents related to large, hybrid airship design.
The only Lockheed Martin hybrid airship to fly was the P-791, which was a 120 foot (36.6 meter) long, tri-lobe, semi-buoyant hybrid airship that flew under a Defense Advanced Research Projects Agency (DARPA) sponsored Project WALRUS Phase 1 contract, and also served as a sub-scale technology demonstrator for future Lockheed Martin heavy-lift hybrid airships. The first flight of the P-791 took place on 31 January 2006 at Lockheed Martin’s facility in Palmdale. Airship magazine reported that the P-791 flew six times. Lockheed Martin claimed that all flight test objectives were successfully met and there were no subsequent flight tests.
Lockheed Martin P-791. Source: Lockheed Martin (2006)
In March 2011, Lockheed Martin announced that it planned to develop a larger commercial version of the P-791, to be called SkyTug, which would be a scaled up hybrid airship designed to carry at least 20 tons of cargo. A trademark application for the term “SkyTug” was filed on 25 August 2011.
By 2013, reference to SkyTug had disappeared and Lockheed Martin was promoting the LMH-1 as their next large commercial hybrid airship based on the P-791 design.
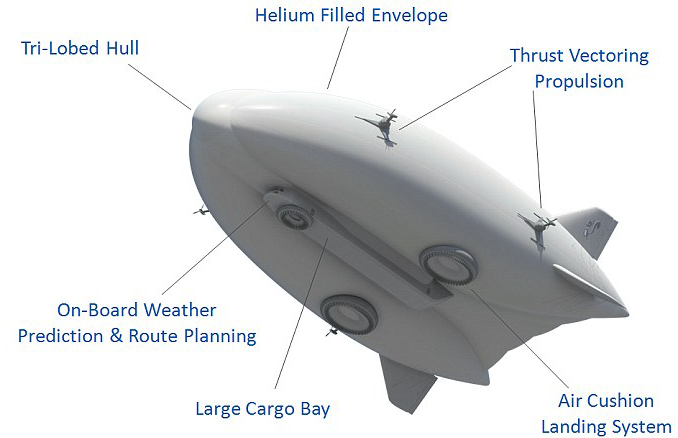
General arrangement of the LMH-1 hybrid airship. Source: Lockheed Martin
Rendering, LMH-1 bow quarter view.Source: Lockheed Martin via BBC (November 2019)
On March 12, 2012 the U.S. Federal Aviation Administration (FAA) announced that Lockheed Martin Aeronautics submitted an application for type certification for the model LMZ1M (LMH-1), which is “a manned cargo lifting hybrid airship incorporating a number of advanced features.” The FAA assigned docket number FAA-2013-0550 to that application.
To address the gap in airship regulations head-on, Lockheed Martin submitted to the FAA their recommended criteria document, “Hybrid Certification Criteria (HCC) for Transport Category Hybrid Airships,” which is a 206 page document developed specifically for the LMZ1M (LMH-1). The HCC is also known as Lockheed Martin Aeronautics Company Document Number 1008D0122, Rev. C, dated 31 January 2013. You can download the HCC document and related public docketed items from the FAA website here:
In November 2015, the FAA’s Seattle Aircraft Certification Office approved Lockheed’s project-specific certification plan for the LMZ1M (LMH-1). In a 17 November 2015 press release, Lockheed Martin announced:
“Given that Hybrid Airships did not fit within existing FAA regulations, the team worked to create a new set of criteria allowing non rigid hybrid airships to safely operate in a commercial capacity. Transport Canada was also involved in the development of this criteria to ensure it included safety concerns unique to Canada.”
“Lockheed Martin and the FAA have been working together for more than a decade to define the criteria to certify Hybrid Airships for the Transport Category. This criteria was approved by the FAA in April 2013. Following that approval, the team has been developing the project specific certification plan over the past two years, which details how it will accomplish everything outlined in the Hybrid Certification Criteria.”
“Earlier this year Lockheed Martin along with Hybrid Enterprises LLC kicked off sales for the 20 ton variety of the Hybrid Airship. They are on track to deliver operational airships as early as 2018.”
No new documentation was subsequently added to the public webpage for docket FAA-2013-0550, so there was no public visibility of the type certification effort.
In September 2017, Lockheed Martin reported it had Letters of Intent (LOIs) for 24 LMH-1 hybrid airships, with their largest customer being Straightline Aviation (https://www.straightlineaviation.com), which had signed an LOI for 12 LMH-1s. At that time, the first “float out” of the LMZ1M (LMH-1) had slipped to 2019. As of May 2023, the airship has not yet been “floated out”.
On 9 May 2023, Lockheed Martin reported, “For some time, we have been in search of a transition partner to continue development of this important commercial work.” That “transition partner” is the newly formed, commercial company AT2 Aerospace.
3. The AT2 Aerospace Z1 Hybrid Airship
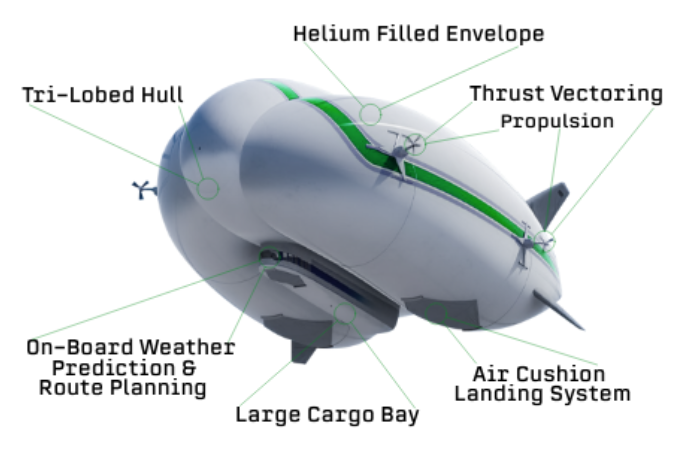
As portrayed on the AT2 Aerospace website, their Z1 hybrid airship appears to be the current incarnation of the former Lockheed Martin LMH-1. AT2 Aerospace summarizes the main attributes of their Z1 hybrid airship as follows:
“AT2 Aerospace’s revolutionary hybrid airship is the future of aviation technology. Capable of operating in the most remote and inaccessible locations, this innovative aircraft offers a cost-effective solution for heavy cargo transpiration while minimizing environmental and social impact.”
“The Z1’s unique Air Cushion Landing System (ACLS) allows the Z1 to land and takeoff from almost any location on the planet.
The Z1 utilizes buoyant lift technology delivering exceptional fuel efficiency, minimizing carbon emissions, and ultimately reducing transportation costs.
The Z1 will connect emerging economies to global trade networks.
The Z1 moves cargo faster than sea and land transportation at a fraction of the cost of existing cargo aircraft, filling a major gap in the global transportation market from a speed vs. cost perspective.”
AT2 Aerospace also identified the following attributes:
Simple controls minimize human error
Large volume cargo bays, larger payloads
Safer in icing effects
Quiet: Ideal for noise sensitive locations
AT2 Aerospace expects that their Z1 hybrid airship will “open the entire world to commerce, humanitarian aid and exploration with affordable and reliable operations.”
General arrangement of the Z1 hybrid airship. Source: AT2 Aerospace
The near-term challenge for AT2 Aerospace will be to get clarity from the FAA on the actions remaining, and the approximate time scale, to conclude the first-ever type certification process for a hybrid airship in the U.S. With a type certificate in hand, the Z1 can be put to the test by a few early-adopters in what hopefully will become an emerging worldwide commercial airship market.
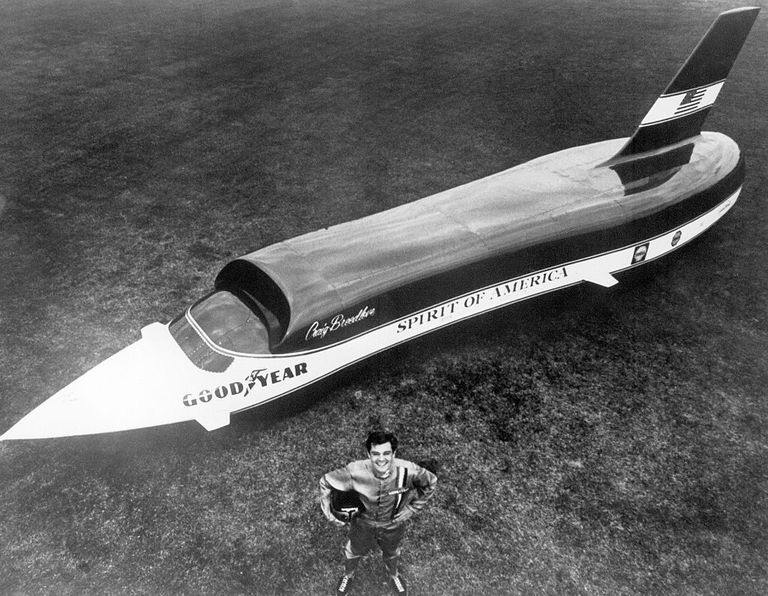
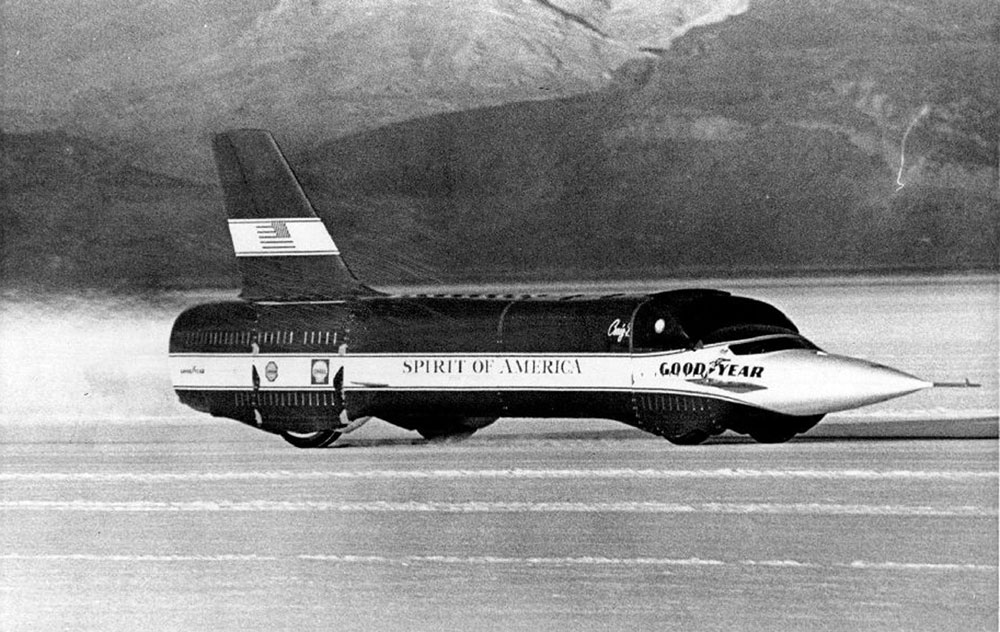
Craig Breedlove is best known as the first person to set land speed records above 400 mph (643.7 kph), 500 mph (804.7 kph) and 600 mph (965.6 kph) in the mid-1960s with his turbojet-powered Spirit of America and its successor, the Spirit of America Sonic 1. He later achieved a peak speed of 675 mph (1,086.3 mph) on a one-way run in his last land speed record car, the Spirit of America Sonic Arrow, in the 1990s.
The first two LSR cars were part of an intense duel from May 1963 to November 1965, primarily between Breedlove and Art Arfons, that resulted in a rapid and exciting increase of the land speed record, from John Cobb’s long-standing 16 September 1947 record of 394.196 mph (634.4 kph) in the piston-engine Railton Mobile Special, to Craig Breedlove’s 15 November 1965 record of 600.601 mph (966.6 kph) in the Spirit of America Sonic 1. In this two-and-a-half year period, there were 10 incrementally faster unofficial (not FIA certified) and official FIA land speed records. You’ll find a complete list of land speed record holders here: https://landspeedrecord.org/speed-records/
Needless to say, this was an exciting time that commanded attention to the latest news from the Bonneville salt flats.
Breedlove’s last LSR car, the Spirit of America Sonic Arrow, made its first test run on the Black Rock Desert in Gerlach, NV, on 28 October 1996. During the run, Breedlove reached a peak speed of about 675 mph (1,086 kph), but encountered higher-than-expected crosswinds that caused a dramatic high-speed U-turn that severely damaged the vehicle, which survived but was in need of significant repairs.
In 1997, the repaired Sonic Arrow experienced a series of mechanical problems during speed runs at Black Rock and program funding issues prevented Breedlove from completing another land speed record attempt.
Later in 1997, the British LSR team, which also was at Black Rock with driver Andy Green and their Thrust SSC LSR car, had a series of successful speed runs and they beat Breedlove to the milestones of setting land speed records greater than 700 mph (1,126.5 kph) and at supersonic speed (greater than 761.2 mph / 1,225 kph / Mach 1.0 at sea level at 15ºC/59ºF).
On 25 September 1997, Andy Green set a new land speed record of 714.144 mph (1149 kph / Mach 0.94), and less than a month later, set the first ever two-way supersonic land speed record at 763.035 mph (1,228 kph / Mach 1.02) on 15 October 1997. This record still stands in 2023.
After almost a decade without making another LSR run, Breedlove sold his Sonic Arrow in 2006 to adventurer Steve Fossett in 2006. Unfortunately, Fossett was killed in a September 2007 aircraft crash before being able to mount his own LSR challenge in his improved Sonic Arrow, which was rolled out in October 2007.
Craig Breedlove passed away on 4 April 2023, at the age of 86. He was an inspiration to me, and perhaps to many in my generation who shared an interest in the enormous challenges of raising the land speed record, and surviving to tell about it.
Craig Breedlove & the original Spirit of America set the first speed records above 400 mph on 5 August 1963 and 500 mph on 15 October 1964. Source: Sports Car DigestSpirit of America during a speed run at Bonneville. Source: The Drive With Alan TaylorCraig Breedlove & Spirit of America Sonic 1 set the first FIA-recognized speed record above 600 mph on 2 November 1965. Source: Getty via JalopnikSpirit of America Sonic 1 during a speed run at Bonneville. Source: Craig Breedlove via wbur.comCraig Breedlove & Spirit of America Sonic Arrow, circa 1996. Source: bluebird-electric.netSpirit of America Sonic Arrow during a test run on the Black Rock Desert on 28 October 1996. On this course, it reached a peak speed of 675 mph (1,086 kph). Source: AP/Eric Risberg via SFGateSteve Fossett’s 2007 update to the Sconic Arrow LSR car never made a challenge to the land speed record. Source: Screenshot from Scarf and Goggles video (2019)
Where are these LSR cars now?
Breedlove loaned the original Spirit of America to the Museum of Science and Industry in Chicago where it was on display from 1965 to 2015, when the museum returned the LSR car to Breedlove, but not before inflicting significant damage to the car. Breedlove said he intended to repair the LSR car. Howerver, its current whereabouts is not known.
The Spirit of America Sonic I vehicle currently is on display at Indianapolis Motor Speedway Hall of Fame Museum.
The Steve Fossett’s updated Spirit of America Sonic Arrow LSR car currently is on display in the Wings Over the Rockies Air & Space Museum in Denver.
Sam Hawley & Craig Breedlove, “Ultimate Speed: The Fast Life and Extreme Cars of Racing Legend Craig Breedlove,” Chicago Review Press, ISBN-13: 987-1641600200, 2 October 2018
Craig Breedlove, “Spirit of America;: Winning the world’s land speed record,” Henry Regnery Co, ASIN: B0006C2W4Y, 1 January 1971
Sam Hawley, “Speed Duel: The Inside Story of the Land Speed Record in the Sixties,” Firefly Books, ISBN-13: 978-1554076338, 16 September 2010
Videos
“Spirit Of America Sonic Arrow (Formula Shell LSRV) – Craig Breedlove’s Supersonic Challenger,” (13:17 min), posted on YouTube by Scarf and Goggles, 10 August 2019: https://www.youtube.com/watch?v=tvdAw8dJ9cU
In February 2021, I posted the article “The Fork in the Road to Electric Power From Fusion,” with links to a set of supporting articles that provide details on 18 fusion power reactor development projects, mostly at private firms.
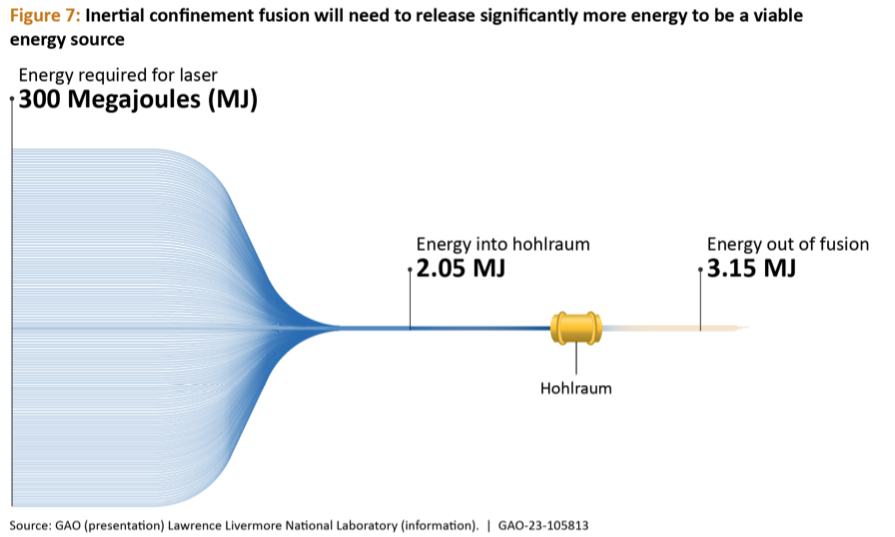
In March 2023, the United States Government Accountability Office issued their report GAO-23-105813, “Technology Assessment – Fusion Energy – Potentially Transformative Technology Still Faces Fundamental Challenge.” This GAO report provides a comprehensive overview of the current status of several different fusion energy concepts being developed worldwide. You can download a copy of this GAO report here: https://www.gao.gov/assets/gao-23-105813.pdf
ANS summarized GAO’s finding: “Despite decades of research and recent promising developments, the report notes, fusion science has still not achieved net energy gain.”
To illustrate this point, GAO commented on the recent high-profile announcement that a net fusion energy gain had been achieved during a test at the National Ignition Facility (NIF). GAO graphically showed how this claim is only true from the perspective of the small fusion reaction chamber (the Hohlraum) at the heart of NIF. As shown in the following GAO diagram, which appropriately treats the whole NIF as a “black box,” a total of 300 Megajoules (MJ) were input to the facility and only 3.15 MJ were generated by fusion reactions in the Hohlraum. That fusion power was absorbed by the Hohlraum and adjacent NIF structures and systems. No “net power” left the NIF “black box,” but then, NIF wasn’t designed to be a power plant.
As future claims of net energy gain are made by the various fusion power reactor development teams, think of each of their fusion facilities as a black box. The future of fusion-generated electricity depends first and foremost on being able to get much more energy out of the black box than went into it.
National Submarine Day, which occurs each year on 11 April, honors the anniversary of the day in 1900 when the U.S. Navy acquired the Holland VI submarine, which has been generally recognized as the world’s first modern submarine.
Similar, though slightly larger variants of the original Holland VI design also were acquired by the UK (1901 – 1904) and Japan (1904).
2. The Holland VI and the original U.S. Holland-class submarines
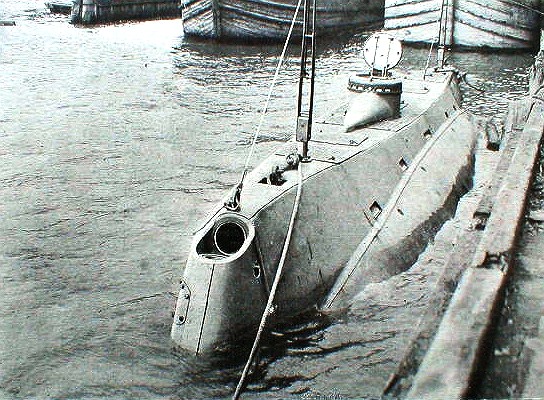
Designed in 1896 by Irish-American inventor John Phillip Holland and his Holland Torpedo Boat Company, the Holland VI was built at the Crescent Shipyard in Elizabeth, New Jersey, where Arthur Leopold Busch was the chief constructor / naval architect. The Holland VI was launched on 17 May 1897. This diminutive submarine (by today’s standards) had an overall length of 53 ft 10 in (16.41 m), displacements of 65 tons surfaced / 75 tons submerged, and was operated by a crew of six.
Picture post card of the USS Holland (SS-1). Source: Universal Ship Cancellation Society (USCS #3608)
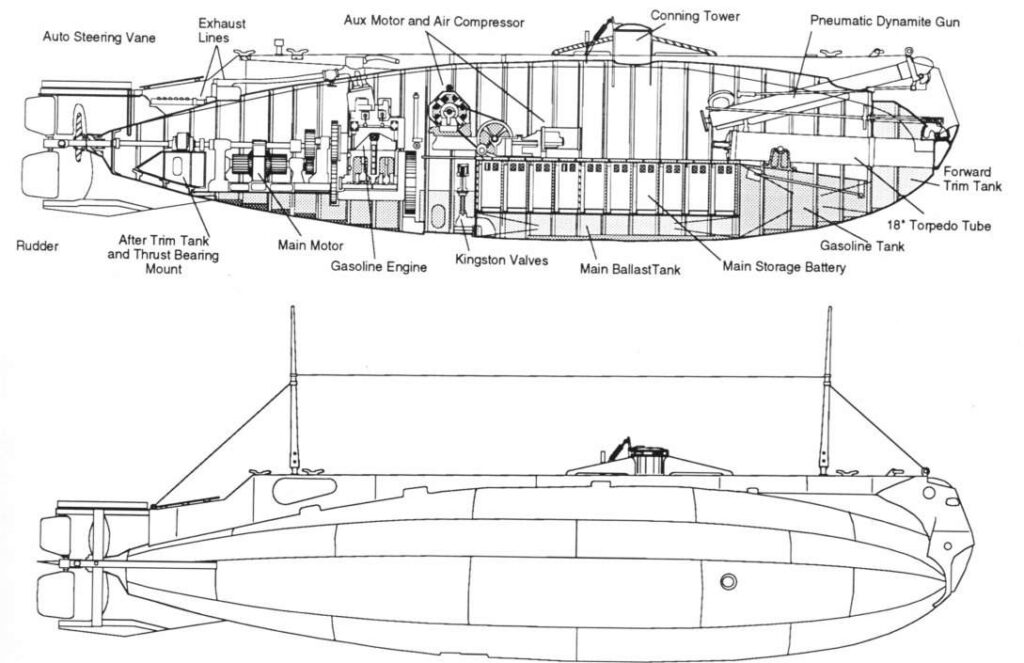
The Holland VI brought together a host of impressive features for the first time in one vessel, including:
Efficient hydrodynamic hull shape [teardrop-shape with bulbous bow and tapered stern] with good seakeeping ability on the open ocean.
Separate main and auxiliary ballast systems enable rapid diving and surfacing with minimial changes to the longitudinal center of gravity while underway.
Accomplished by operating with full or nearly full ballast tanks when submerged.
Allowed precise control of trim angle while submerged.
Able to dive to and accurately maintain a significant depth [up of 75 feet (23 m)].
Diving planes provide the means to precisely control depth [stern planes only, located behind the propeller].
Dual propulsion systems driving a single propeller at the stern.
Internal combustion engine provides reliable power on the surface, enabling long transits while charging the batteries [up to 200 nautical miles (370 km) at 6 knots]
Lead-acid storage batteries provide power to run submerged for a considerable distance [about 30 nautical miles (56 km) at 5.5 knots].
Conning tower for directing ship and weapons activities on the surface or semi-submerged.
No periscope. View ports around the top of the conning tower provided the commander with intermittent views while “porpoising” semi-submerged near the surface.
Offensive weapons systems.
One reloadable torpedo tube at the bow, with three self-propelled torpedoes carried internally.
One pneumatic dynamite gun at the bow that, on the surface, fired large projectiles, sometimes called “aerial torpedoes.” [This was subsequently removed].
John P. Holland first demonstrated the Holland VI to the U.S. Navy on 17 March 1898. It appears that Submarine Day originally was celebrated to mark anniversaries of this date.
USS Holland (SS-1) internal and external arrangements. The interior space was one contiguous compartment. Source: Navsource.com
The U.S. Navy purchased the Holland VI for $150,000 on 11 April 1900. The Navy renamed and commissioned the submarine as the USS Holland on 12 October 1900. While the Navy previously owned and operated two submarines, Alligator (1862 – 63) and Intelligent Whale (1869 – 73), the USS Holland was the first commissioned submarine in the fleet. Lieutenant H.H. Caldwell became the first commanding officer of a modern commissioned submarine.
On 25 August 1905, the USS Holland made history by being the first American submarine to carry a U.S. President, Theodore Roosevelt, while she ran submerged for 55 minutes.The Navy ordered six more Holland-class submarines from the Electric Boat Company, which was founded in 1899 and had acquired the Holland Torpedo Boat Company and the continuing services of John P. Holland as Manager. Patent US702729 was granted on 17 June 1902 for Holland’s submarine design and assigned to Electric Boat Company.
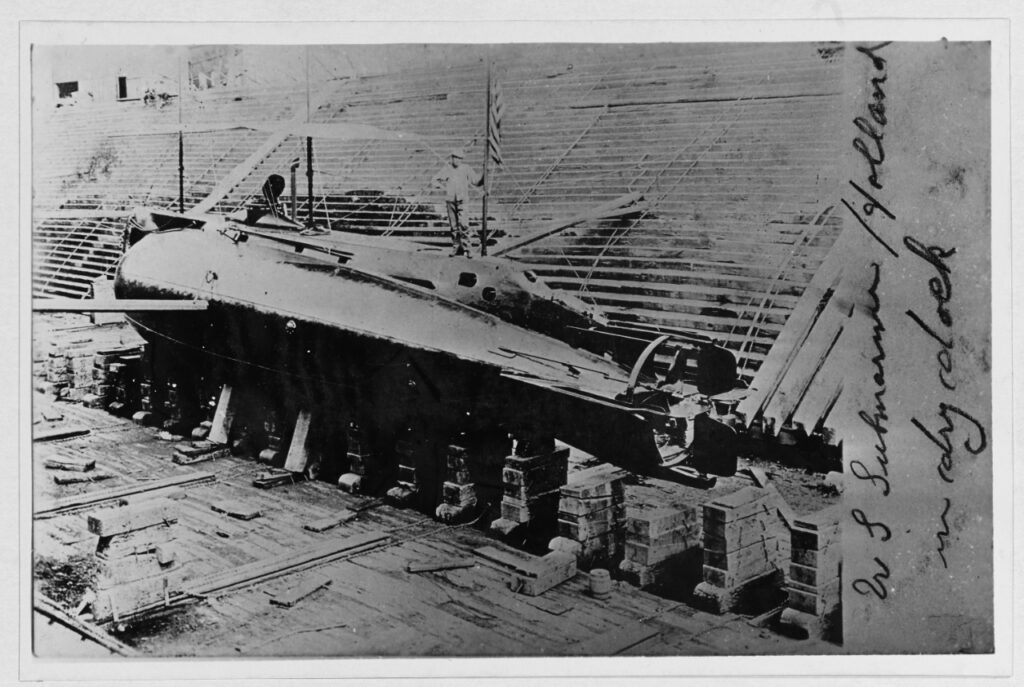
Bow quarter view of USS Holland (SS-1) in drydock. Source: Naval Institute photo archiveStern quarter view of USS Holland (SS-1) in drydock. Source: Naval History and Heritage CommandBow view of USS Holland (SS-1) dockside showing the muzzle of the pneumatic dynamite gun at the bow and the open conning tower amidships. Source: Scientific American 1898 via Wikimedia Commons
John Philip Holland in the conning tower. Note the viewing ports around the top rim of the tower. Source: Wikimedia Commons
Reenactment showing the interior of the conning tower. Source: screenshot from “Submarine #1” video (2022)
The U.S. Navy’s Holland-class subs rapidly became obsolete as submarine technology advanced. USS Holland finished out her naval career in Norfolk, VA, was stricken from the Navy Register of Ships on 21 November 1910, and was sold for scrap in 1913. The USS Holland did not receive its “SS-1” designation until the Navy’s modern hull classification system was instituted on 17 July 1920.
3. The UK Holland-class submarines
In their online history, BAE Systems reports, “Following meetings with the Admiralty, an agreement was made on 27th October 1900 between the Electric Boat Company and Vickers Sons & Maxim Ltd of Barrow-in-Furness, giving Vickers 25-year license to manufacture the Holland-class of submarines, using Electric Boats patents.”
Vickers built five Holland-class subs for the Royal Navy. These were somewhat larger than their U.S. counterparts, with a length of 63 ft 4 in (19.3 m), a submerged displacement of 107 tons and a crew of eight.
HMS Holland 1 underway. Source: RN Submarine Museum via Wikipedia
The first sub, designated Holland 1, was launched in 1901. After 12 years of service, it was decommissioned in 1913 and sank at sea while under tow near Plymouth, on its way to be scrapped. The location of the sunken sub was discovered in 1981 and the largely intact vessel was raised in 1983. Today, the Holland 1 is on display at the Royal Navy’s Submarine Museum in Gosport, UK, in a climate-controlled environment designed to arrest further corrosion.
UK’s Holland 1 in a drydock after being recovered from the seabed in 1983. Source: screenshot from The National Museum of the Royal Navy video (2022)
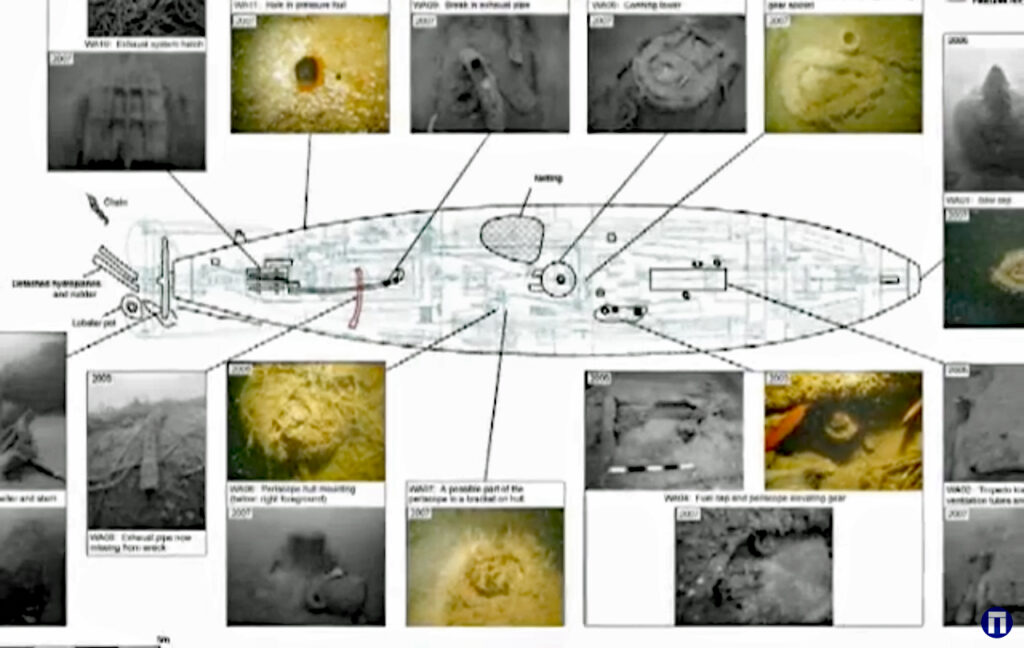
The last of the UK’s Holland-class submarines, Holland 5, was launched in 1904. After eight years in service, Holland 5 sank off the coast of Sussex in 1912 while being towed for decommissioning. In 1985, the intact, but encrusted, submarine was located on the seabed at a depth of 35 meters (115 ft), where it remains today, subject to the Protection of Wrecks Act 1973.
Map of the UK’s HMS Holland 5 on the seabed. Source: screenshot from Wessex Archaeology video (2010)
4. The Japanese Holland-class submarines
Japanese representatives had sailed aboard Holland IV during early testing in 1898 and during trials on the Potomac River in 1900. During the Russo-Japanese War, the Japanese government purchased five “improved” Holland-class submarines from the Electric Boat Company in great secrecy, since the U.S. was a “neutral” nation. These submarines had a length of 67 ft (20.4 m) and a submerged displacement of 126 tons. They were delivered to Japan partially assembled in December 1904. Assembly was completed at the Yokosuka Naval Arsenal, the crews were trained, and the submarines were ready for combat operations in August 1905. None saw action before the war ended in September 1905. They served as training boats until being retired from service 1920.
Japan’s first submarine squadron consisted of five “improved” Holland-class (Type 7-P) subs. Source: Dynamic America, edited by J. Niven, 1960, via Gary McCue
5. Comparison with today’s nuclear-powered submarines
Since the first production run of Holland-class submarines built for the U.S. Navy, Electric Boat Company (now General Dynamics Electric Boat) has been delivering submarines to the Navy for more than 120 years.
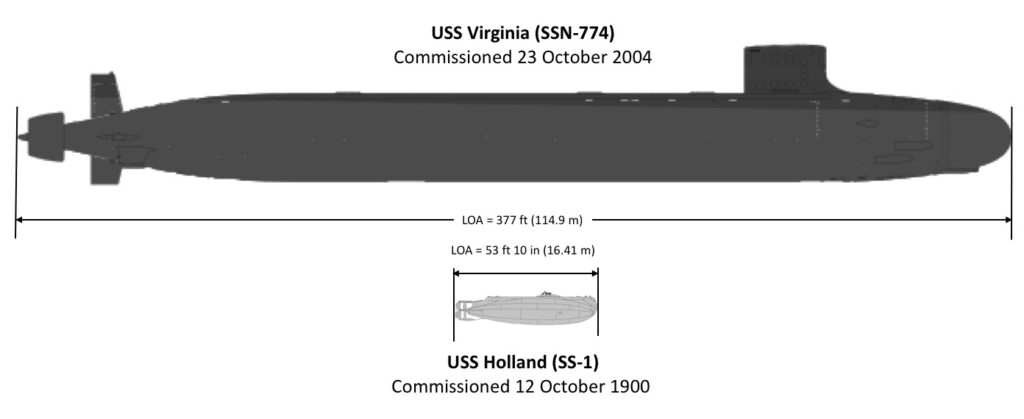
The Navy’s Virginia-class SSNs, which started entering the fleet in 2004 with USS Virginia(SSN-774), are 7,800 ton behemoths in comparison to the USS Holland.
Comparison of USS Holland (SS-1) & USS Virginia (SSN-774) Sources: composite adapted from Wikiwand (SSN-774) & Navsource (SS-1)
Almost 20 years later, the latest Virginia-class Block V SSNs are even bigger, with an overall length of 460 ft (140 m) and a submerged displacement of over 10,000 tons. The largest submarines currently in the Navy’s fleet are the aging Ohio-class SSBNs (strategic missile submarines) and SSGNs (cruise missile submarines). With an overall length of 560 ft (170 m) and a submerged displacement of about 18,750 tons, the Ohio-class subs dwarf all the other U.S. subs.
Since 2018, the U.S. Navy has been testing a large, autonomous, unmanned underwater vehicle (UUV), Echo Voyager, which is 51 feet (15.5 meters) long and has a displacement of about 50 tons. This is approximately the same size as the USS Holland (SS-1).
John P. Holland would be amazed at the progress made in submarine design and operation over the 123 years since the USS Holland was acquired by the U.S. Navy in 1990 and commissioned that same year.
Enjoy National Submarine Day on 11 April, and remember that, in the U.S., it’s pronounced “sub-marine-er,” not “sub-mariner,” as they say in the UK and in Marvel Comics. If you’re going to dress up for the occasion, may I suggest this stylish T-shirt.
“Navy Virginia (SSN-774) Class Attack Submarine Procurement: Background and Issues for Congress,” Congressional Research Service report RL32418, updated 21 December 2022: https://sgp.fas.org/crs/weapons/RL32418.pdf
“Navy Large Unmanned Surface and Undersea Vehicles: Background and Issues for Congress,” Congressional Research Service report R45757, updated 21 December 2022: https://sgp.fas.org/crs/weapons/R45757.pdf
“‘No Deck to Strut Upon’ 1971 U.S. Navy Film, John P. Holland and Development of the Submarine, 80114,” (28.06 min), Periscope Films, posted online 7 June 2022: https://www.youtube.com/watch?v=mVzhn3X93Hg
“The Royal Navy’s first submarine, Holland 1, turns 120 years old in 2021,” (2:56 min), posted by The National Museum of the Royal Navy, 27 September 2021:https://www.youtube.com/watch?v=KgzHUFc4aQM
On 30 September 1968, the first Boeing 747 was rolled out at the company’s plant in Everett, WA. The first flight took place on 9 February 1969, and the FAA certified the 747 in December of that year. Pan Am was the first airline to offer Boeing 747 service on 22 January 1970, flying from New York to London.
1st Boeing 747 rolled out on 30 September 1968. Source: Everett Herald
After a 54-year production run, the last 747, a 747-8 freighter, was rolled out of the factory on Tuesday, 6 December 2022. Boeing built a total of 1,574 747s in a range of models for commercial and military customers.
Boeing’s last 747 rolled off the assembly line. Source: Paul Weatherman/Boeing