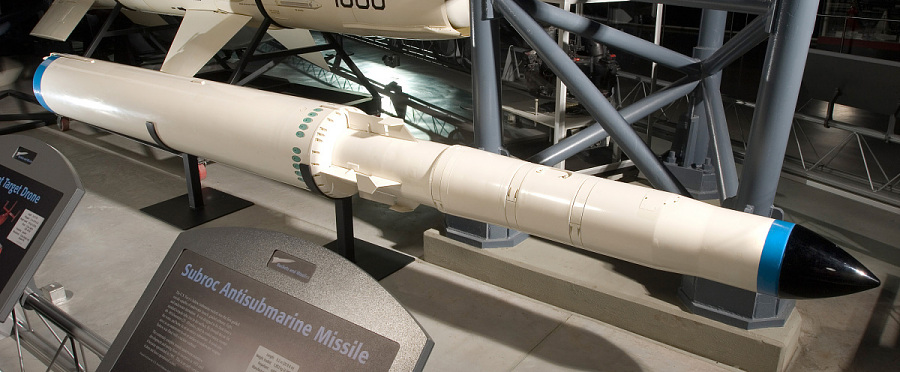
The UUM-44 SUBROC (SUBmarine-launched anti-submarine ROCket) was a 22 ft (6.7 m) long, inertially-guided, long-range weapon that consisted of a solid fuel booster rocket with a W55 thermonuclear depth charge warhead.
SUBROC on display at the Smithsonian Air & Space Museum annex, Udvar-Hazy Center. Source: National Air & Space Museum
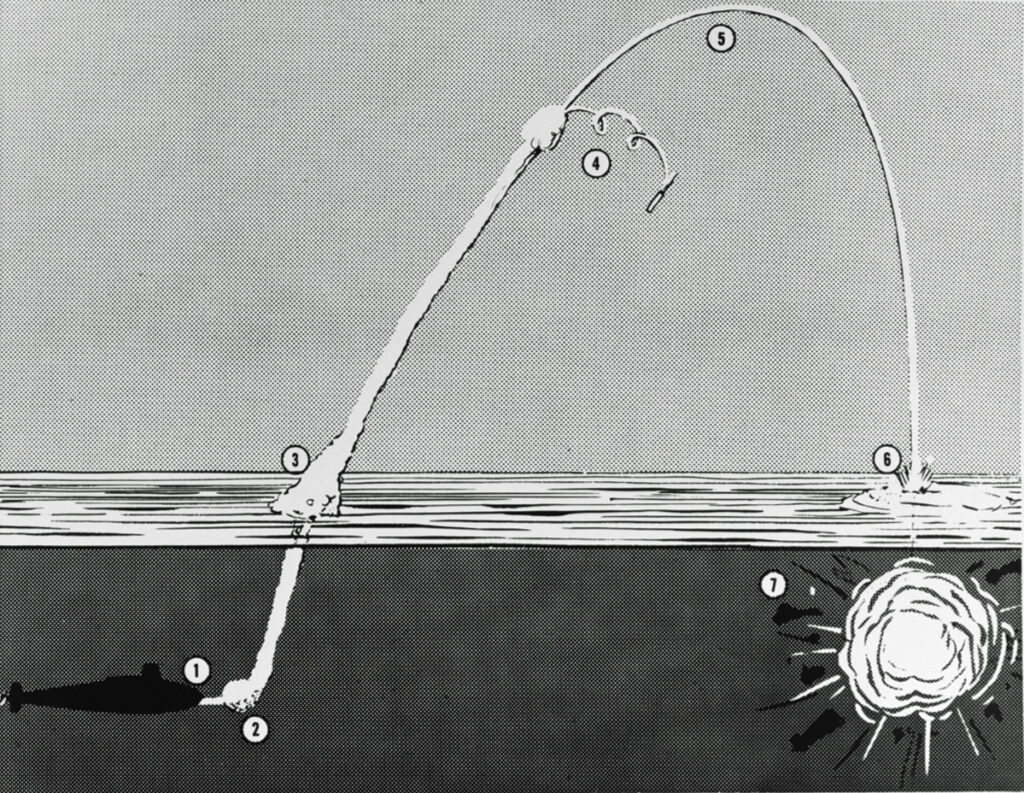
As shown in the following diagram, SUBROC was launched horizontally from a standard submarine 21 in (533 mm) diameter torpedo tube. When the missile surfaced, the booster rocket ignited and flew toward the target. The warhead separated when the booster was expended and then flew a ballistic trajectory to the target area, where it re-entered the water and detonated at a prescribed depth.
SUBROC mission profile. Source: US NavySUBROC launch. Source: US Navy
The SUBROC had a range reported in various sources from 25 – 50 miles (40.2 – 80.5 km), roughly bracketing the range from the launching submarine to a deep water target in the first convergence zone. This deep water acoustic phenomena focuses sound from a distant target at specific distances (convergence zones), depending on a variety of hydrographic conditions, and can permit passive detection of a surface or submerged target at much longer ranges than are possible by a direct path.
Development by Goodyear Aerospace began in 1958, technical evaluation was completed in 1963, and Initial Operating Capability (IOC) aboard USS Permit (SSN-594) was achieved in 1964.
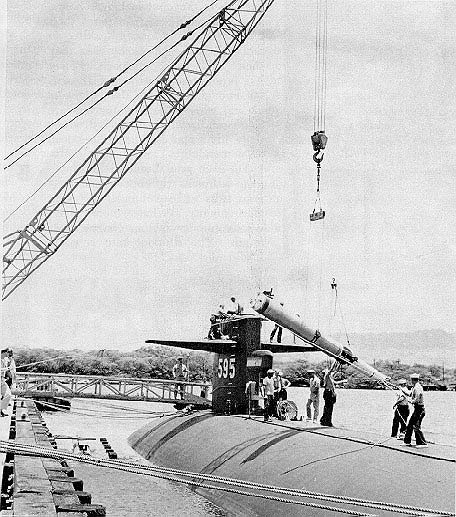
SUBROC loading on USS Plunger (SSN-595). Source: missilery.info
While SUBROC production ended in 1968, the weapon was operational for 25 years, until it was retired from the U.S. submarine fleet in 1989. The National War Memorial Registry preserves a record of a Cold War memorial plaque commemorating the SUBROC at the corner of C Street & 1st Street in Norfolk, VA.
Source: National War Memorial Registry
So what’s the connection between SUBROC and the unique 355-foot (108-meter), non-self-propelled vessel known as the FLoating Instrument Platform (FLIP), which was designed with a rather conventional bow and a long cylindrical hull that could be partially flooded at sea to enable the vessel to float vertically in the water with most of the hull submerged, like a giant spar buoy?
FLIP transitioning from horizontal to vertical. Source: New Atlas
Scripps Institute of Oceanography provides the following answer:
“Research Platform FLIP was developed to provide a stable platform to measure fine-scale fluctuations in phase and amplitude of sound waves for the U.S. Navy SUBROC (SUBmarine ROCket) program. One of the major questions concerned bearing accuracy obtained acoustically out to convergence-zone ranges. Horizontal temperature/salinity gradients in the ocean could introduce bearing errors in the volume of the ocean, and sloping bottoms could do the same for acoustic paths that interacted with the bottom. The Navy needed precise measurements to determine the effect of environmental gradients and fluctuations.
On July 23, 1962, FLIP was tested for the first time in the Dabob Bay area of the Hood Canal in Washington state on the Navy tracking range. After successfully completing trials of the flipping operation, it was towed to San Diego to commence operations in September 1962.
Many years of operations have included deployments in the Pacific as far as Hawaii and one deployment to the Atlantic. While originally intended for acoustic research, it has become a versatile platform for research in upper-ocean physical oceanography, meteorology, geophysics, and biology.”
FLIP’s bow contained the uniquely-equipped habitable spaces that enabled the crew and scientists to work when the ship aligned horizontally or vertically.
A not-so-simple double sink. Source: Scripps Institute of Oceanography
Work platforms when flipped.Source: Scripps Institute of Oceanography
FLIP in the floating dry dock ARCO at Naval Base Point Loma in the 2000s. Source: Scripps Institute of Oceanography
After an operational lifetime of more than 60 years, during which FLIP conducted more than 380 flipping operations, the unique vessel was retired and towed to a dismantling and recycling facility in Mexico in August 2023.
30 October 2024 update:
Fortunately, FLIP has been saved by the UK firm DEEP, which announced in October 2024, “..the rescued platform has made its way from Mexico, through the Panama Canal and across the Atlantic to the Mediterranean, where over the next 12 – 18 months she will be refitted and modernized in France.” You’ll find more information on DEEP’s acquisition of FLIP in the 23 October 2024 DEEP press release and the related USNI article.
For more information on SUBROC and FLIP, check out the following references:
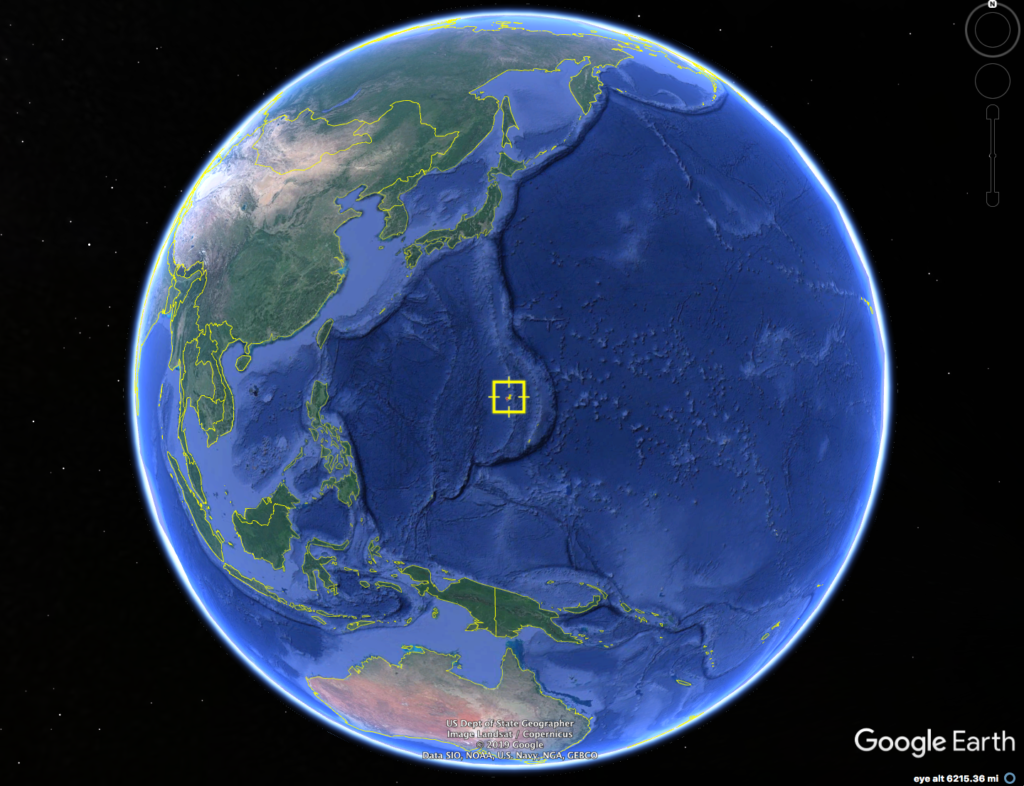
The Challenger Deep, in the Mariana Trench in the middle of western Pacific Ocean, is the deepest known area in the world’s oceans. Its location, as shown in the following map, is 322 km (200 miles) southwest of Guam and 200 km (124 miles) off the coast of the Mariana Islands.
Location of the Mariana Trench. Source: Google Earth
Since the first visit to the bottom of the Challenger Deep 60 years ago, on 23 January 1960, there have been only five other visits to that very remote and inhospitable location. In this post, we’ll take a look at the deep-submergence vehicles (DSVs) and the people who made these visits.
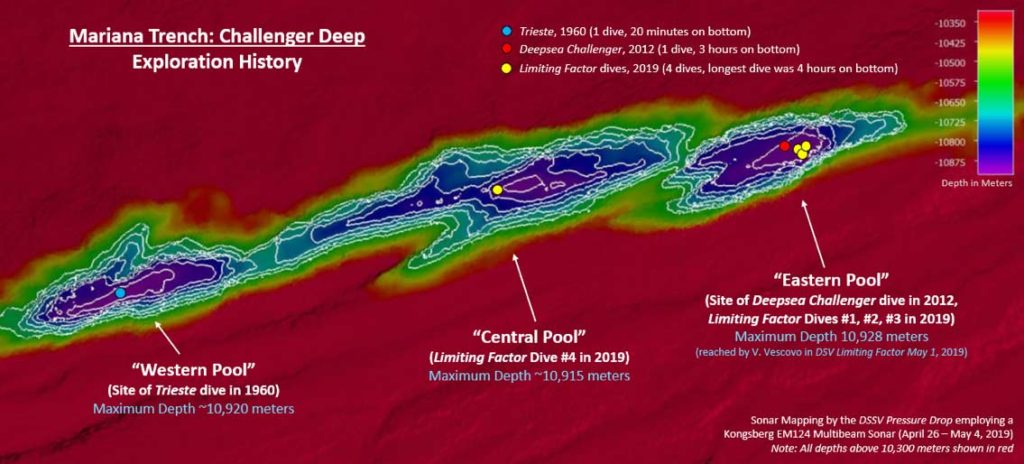
The following topographical map, created in 2019 by the Five Deeps Expedition, shows that the Challenger Deep is comprised of three deeper “pools.” The dive locations of the manned expeditions into the Challenger Deep are shown on this map.
1960: Navy Lieutenant Don Walsh and Swiss engineer Jacques Piccard, in the bathyscaphe Trieste, made the first manned descent into the Challenger Deep and reached the bottom at 10,916 meters (35,814 ft) in the “Western Pool.”
2012: Canadian filmmaker and National Geographic Explorer-in-Residence James Cameron, in the DSV Deepsea Challenger, reached the bottom at 10,908 meters (35,787 ft) the “Eastern Pool.”
2019: Businessman, explorer and retired naval officer Victor Vescovo, in the DSV Limiting Factor, made two dives in the “Eastern Pool” and reached a maximum depth of 10,925 meters (35,843 feet).
2019: Triton Submarine president, Patrick Lahey, in the DSV Limiting Factor, made two dives to the bottom, one in the Eastern Pool and one in the Central Pool.
Topography of the Challenger Deep and locations of the deep dive sites. Source: Five Deeps Expedition
What is there to see on the way down to the bottom?
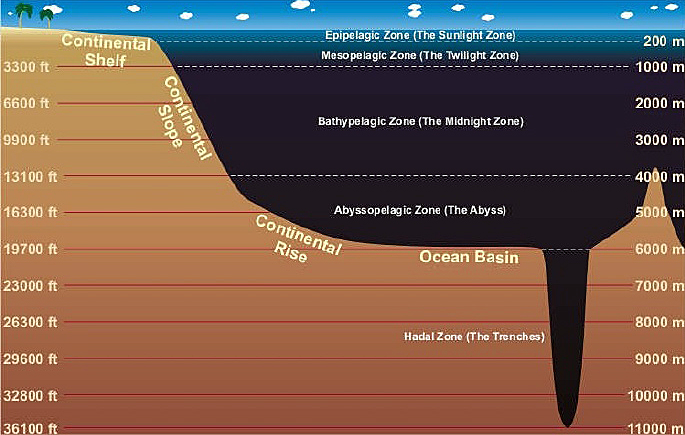
The oceans can be divided into vertical zones based on water depth. This basic concept is shown in the following diagram.
The five vertical zones in the above diagram have the following general characteristics:
The Sunlight Zone: This is the shallow (upper 150 meters), sunlit upper layer of the ocean, extending above the continental shelf. Phytoplankton can photosynthesize in this zone.
The Twilight Zone: This is the medium-depth ocean where sunlight is still able to penetrate to a modest depth (a few hundred meters). There is enough light to see, but not enough for photosynthesis. This zone is bounded by the edges of the continental shelf and islands in the deep ocean.
The Midnight Zone: This is the deep ocean, which is bounded by the continental slope and the seamounts and islands rising above the ocean floor. No sunlight is able to reach this deep. There is no photosynthesis in this zone.
The Abyssal Zone: This zone includes the deep ocean plains and the deep cusp of the continental rise. The temperature here is near freezing and very few animals can survive the extreme pressure.
The Hadal Zone: This is the ocean realm in the deep ocean trenches. More people have been to the Moon than to the Hadal Zone.
The Challenger Deep is the deepest known Hadal Zone on our planet. On the way down through 11 kilometers (6.8 miles) of ocean, the few explorers who have reached the bottom have seen aquatic life throughout the water column and on the sea floor. You can take a look the varied and strange sea life by scrolling through the well done graphic, “The Deep Sea,” by Neal Agarwal, which is at the following link.
Now, let’s take a look at the few manned missions that have reached the bottom of the Challenger Deep.
1960: Jacques Piccard and Don Walsh in the bathyscaphe Trieste
Trieste was designed by Swiss scientist Auguste Piccard and was built in Italy. This deep-diving research bathyscaphe enabled the operators to make a free dive into the ocean, without support by cables from the surface. Trieste was launched in August 1953, operated initially by the French Navy and acquired by the U.S. Navy in 1958.
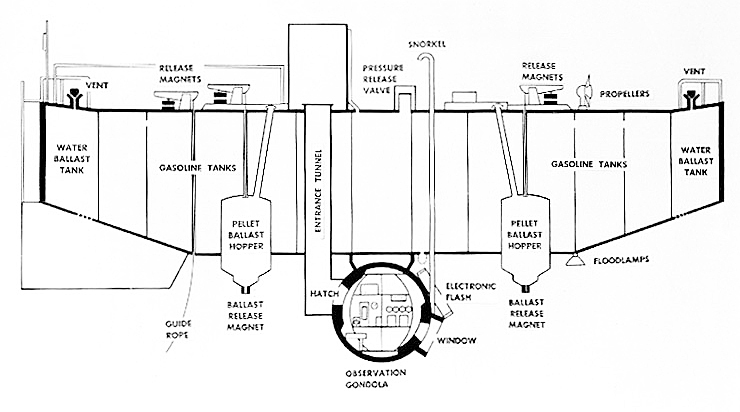
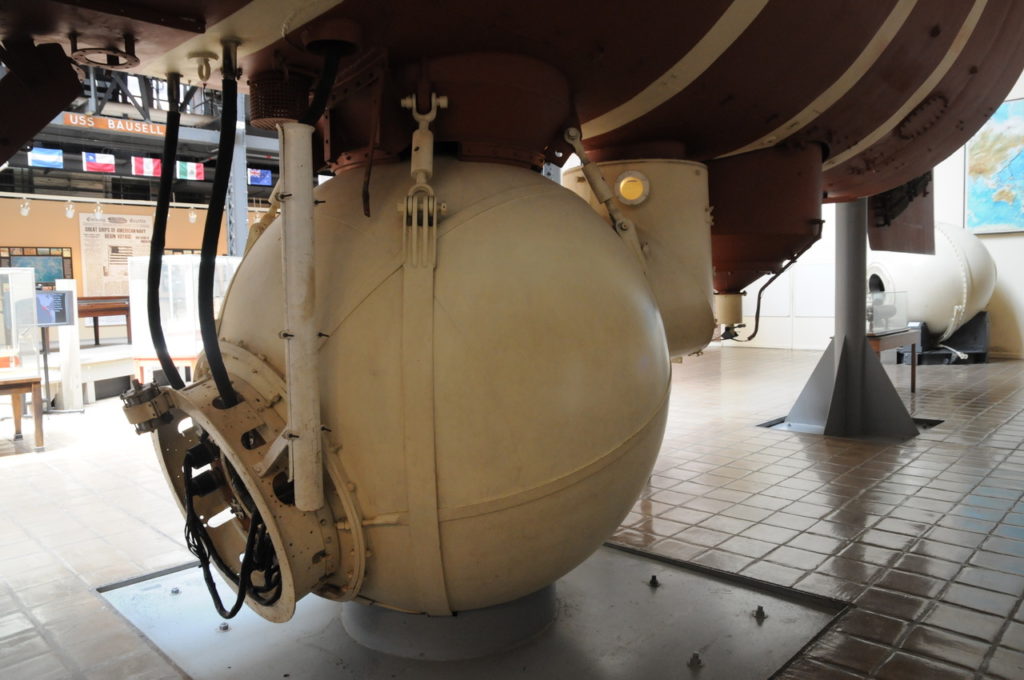
The design of the 15 meter (50 ft) bathyscaphe Trieste is analogous to a zeppelin that has been redesigned to operate underwater. On Trieste, the “gondola” is a 14-ton spherical steel pressure vessel for two crew members. The weight of this “gondola” is carried under a large, lightweight, cylindrical float chamber filled with gasoline for buoyancy (gasoline is less dense than water). There is no differential pressure between the float chamber and the open ocean.
General arrangement of the bathyscaphe Trieste. Source: National Geographic
The Trieste is positively buoyant when loaded with ballast and floating on the surface before a mission. To submerge, Trieste would take on seawater and fill its fore and aft water ballast tanks. If needed to achieve the desired negative buoyancy, Trieste also could release some gasoline from the main float chamber. To achieve positive buoyancy at the end of a mission and ascend back to the surface, the pellets in the two ballast hoppers would be released, and Trieste would slowly rise to the surface.
The propulsion system consists of five special General Electric 3-hp dc motors. These motors are designed to operate in inert fluid (silicone oil) and are subjected to full ambient pressure during diving operations. These modest propulsors gave Trieste only limited mobility.
After acquisition by the Navy, Trieste was transported to San Diego, CA, for extensive modifications by the Naval Electronics Laboratory.
After a series of local dives in Southern California waters, Trieste departed San Diego on 5 October 1959 aboard a freighter and was transported to Guam to conduct deep dives in the Pacific Ocean under Project Nekton. After arriving in Guam, record-setting dives to 18,000 and 24,000 feet were conducted in nearby waters by Navy Lieutenant Don Walsh and Swiss engineer Jacques Piccard (son of Auguste Piccard). Then Trieste was towed to the Mariana Trench dive site, where Walsh and Piccard began their mission into the Challenger Deep on 23 January 1960.
Trieste just before the record dive on 23 January 1960. The destroyer escort USS Lewis is in the background. Source: U.S. Navy photo.
Don Walsh (L) and Jacques Piccard (R) aboard Trieste. Source: U.S. Navy photo.
The mission took 8 hours and 22 minutes on the following timeline:
Descent to the ocean floor took 4 hours 47 minutes. They reached the bottom at a depth of 10,916 meters (35,814 ft).
Time on the bottom was 20 minutes.
Ascent took 3 hours and 15 minutes.
For much of the mission, cabin temperature was about 7° C (45° F). While on the bottom, Walsh and Piccard observed sea life, although the species observed are uncertain. They described the sea bottom as a “diatomaceous ooze.”
Artist’s concept drawing of Trieste on the bottom. Source: Internet Archive, page 21 of the book “The bathyscaph Trieste : technological and operational aspects, 1958-1961,” (1962) by Don Walsh
For a comprehensive review of this historic dive into the Challenger Deep, I recommend that you watch the following video, “Rolex presents: The Trieste’s Deepest Dive,” (22:38).
After successfully completing Project Nekton, Trieste underwent further modifications and was transferred to the East Coast in 1963 to assist in the search for the USS Thresher (SSN-593), which sank off the coast of New England. Trieste found the wreck of the nuclear submarine at a depth of 2,600 m (8,400 ft). Trieste was decommissioned in 1966 and went on display in 1980 at the National Museum of the U.S. Navy in Washington, D.C. Following are photos I took during my visit to that museum.
Trieste bow quarter view, at the National Museum of the U.S. Navy. P. Lobner photo
Trieste stern quarter view. P. Lobner photo
Trieste crew pressure vessel. P. Lobner photo.
2012: James Cameron in the Deepsea Challenger
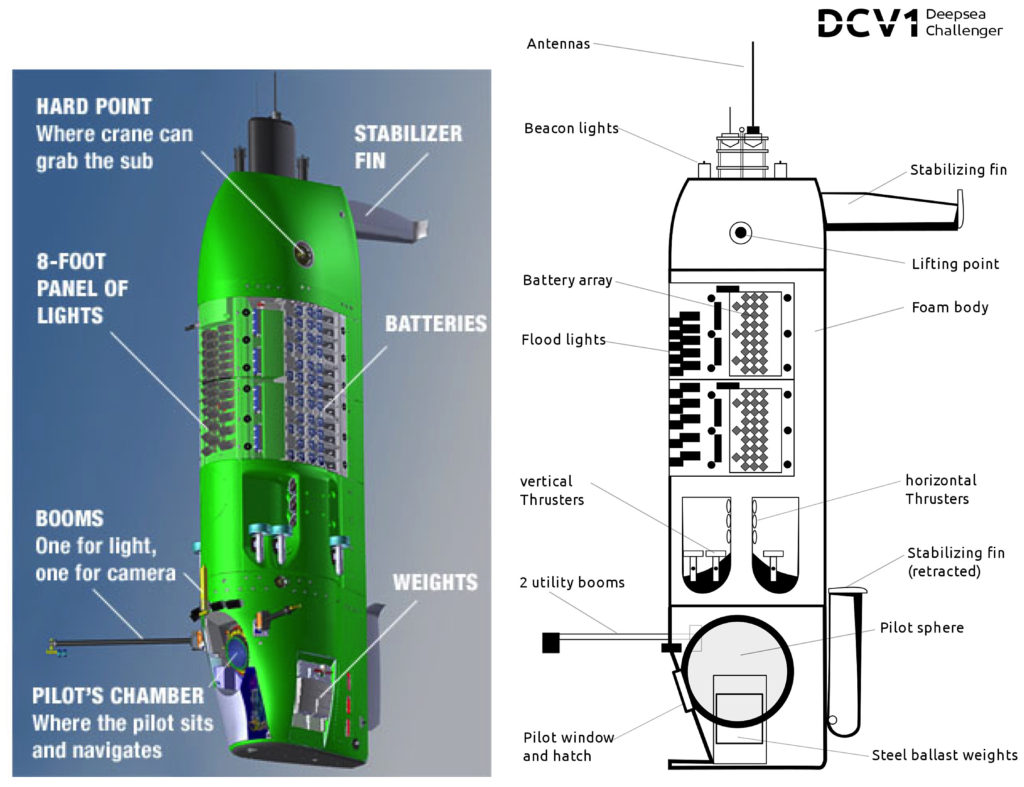
Almost a decade ago, filmmaker and National Geographic Explorer-in-Residence James Cameron led a team that designed and built the one-man, 11.8-ton DSV named Deepsea Challenger (DCV 1) for a mission to dive into the Challenger Deep and reach the deepest point in the ocean. The general arrangement of this novel submersible is shown in the following diagram.
General arrangement of the Deepsea Challenger. Sources: https://www.core77.com (left), Wikipedia (right)
In the water, the submersible floats vertically with the steel pilot’s chamber at the bottom of the vessel. When brought aboard its support vessel, the submersible sits horizontally in a cradle.
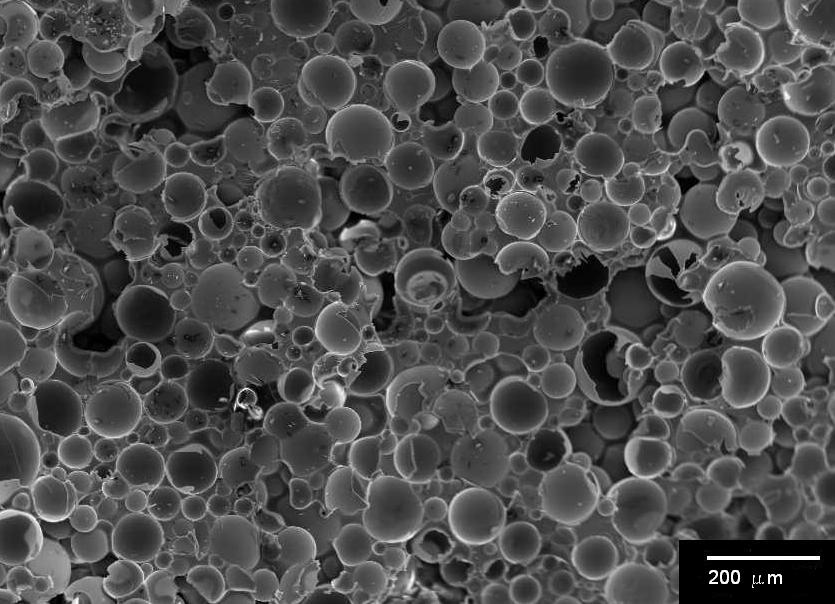
About 70% of the Deepsea Challenger’s volume is comprised of a specialized structural syntactic foam called Isofloat, which is composed of very small hollow glass spheres suspended in an epoxy resin.
Syntactic foam, shown by scanning electron microscopy, consisting of glass microspheres within a matrix of epoxy resin. Source: Nikgupt via Wikipedia
The strength of this structural foam enabled the designers to incorporate 12 thrusters as part of the infrastructure mounted within the foam, but without the need for a steel skeleton to handle the loads from the various mechanisms. The lithium batteries are housed within the syntactic foam structure. The foam also provides buoyancy, like the gasoline-filled float chamber on the bathyscaphe Trieste.
The Deepsea Challenger is equipped with a sediment sampler, a robotic claw, temperature, salinity, and pressure gauges, multiple 3-D cameras and an 8-foot (2.5-meter) tower of LED lights. An underwater acoustic communication system provides the communications link with the support vessel during the dive. Mission endurance is 56 hours.
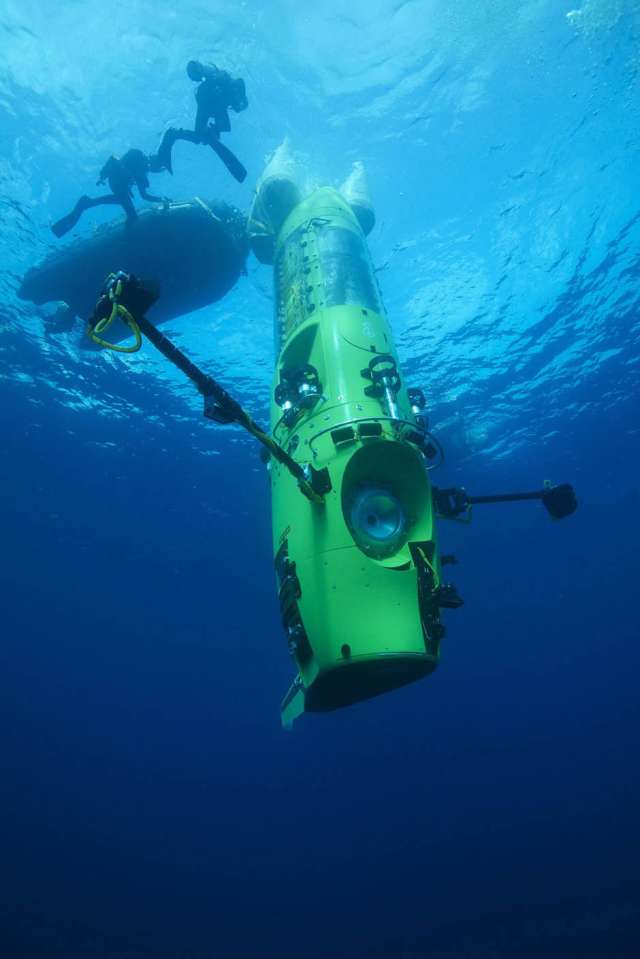
Deepsea Challenger floating vertically in the water with booms extended.Source: National Geographic
On March 26, 2012, more than 52 years after the Trieste’s dive into the Challenger Deep, Cameron plunged 10,908 meters (35,787 feet, 11 kilometers, 6.8 miles) below the ocean surface and became the first solo diver to reach such depths. After a two hour and 36 minute descent, he traveled along the bottom for about three hours and reported it being a flat plain with a soft, gelatinous sea floor. The thrusters enabled precise station keeping and a maximum speed of 3 knots.
Artist’s concept drawing of Deepsea Challenger on the bottom. Source: http://divemagazine.co.ukDeepsea Challenger being lifted aboard its support vessel, the Mermaid Sapphire, after returning from the Challenger Deep. Source: National GeographicJames Cameron emerges from Deepsea Challenger after returning from the Challenger Deep. Source: National Geographic
A National Geographic film of his expedition, Deepsea Challenge 3D, was released to cinemas in 2012. You can watch the short movie trailer (2:44) here:
Cameron was awarded the 2013 Nierenberg Prize for Science in the Public Interest for his deep dive into the Challenger Deep. In the following long video (58:25) “Journey to the Deep,” he shares his experiences and perspectives from his record-setting dive.
The Deepsea Challenger is retired from diving.
2019: Victor Vescovo and the Five Deeps Expedition
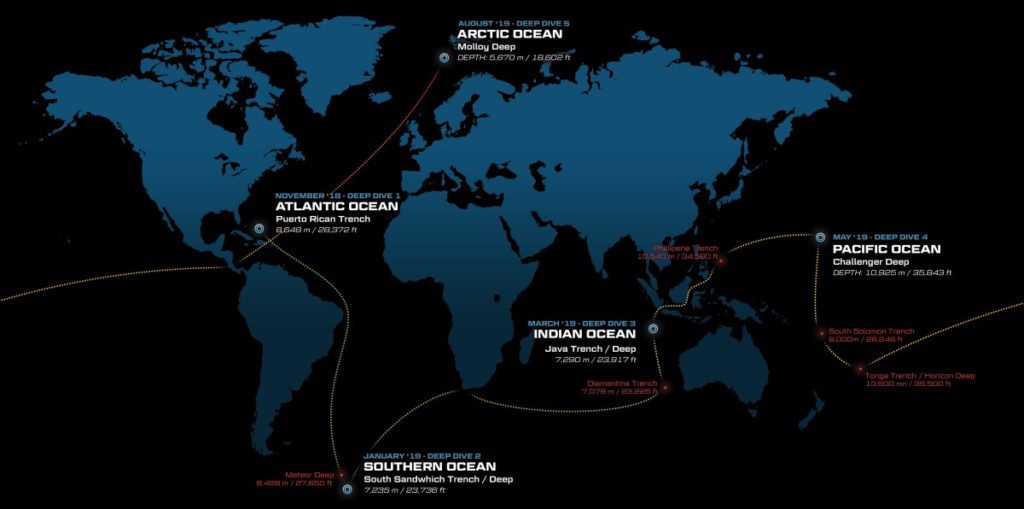
In 2015, businessman and explorer Victor Vescovo partnered with Triton Submarines LLC to design and build the two-person, 14-ton, titanium hull, deep-submergence vehicle Limiting Factor to enable Vescovo to conduct the Five Deeps Expedition to visit the deepest points in the world’s five oceans. The Five Deeps Expedition website is here:
During this period, the expedition covered 87,000 km (47,000 nautical miles) in 10 months and the Limiting Factor submersible completed 39 dives.
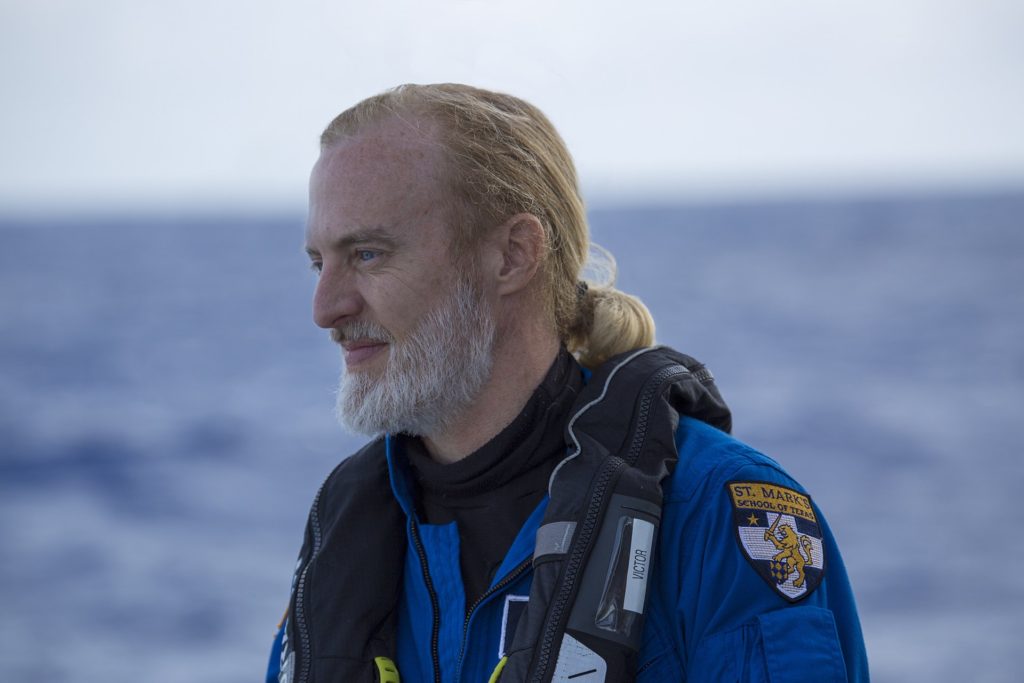
Locations of the Five Deeps diving sites. Source: https://tritonsubs.com/hadal/Victor Vescovo in full dive gear during his 2019 dives to the bottom of the Mariana Trench’s Challenger Deep. Source: Glenn Singleman photo via Wikipedia
The DSV Limiting Factor is a Triton 36000/2 submersible that is designed for dives to 11,000 m / 36,000 ft and pressure tested to 14,000 m / 45,991 ft. Like James Cameron’s Deepsea Challenger, the Limiting Factor is constructed with glass-bead based syntactic foam, which is very durable and able to withstand the enormous pressure placed on the submersible as it descends thousands of meters into the sea, and does so repeatedly without significant deformation or stress fractures developing over time.
The Limiting Factor has a Kraft Telerobotics “Raptor” hydraulic manipulator capable of functioning at full-ocean depth. Mission endurance is 16 hours plus 96 hours of emergency life support.
Triton 36000/2 exterior view. Access hatch is at the top center. Thrusters are located on the sides. View ports for the two-person crew are at the bottom center. Source: Five Deeps Expedition
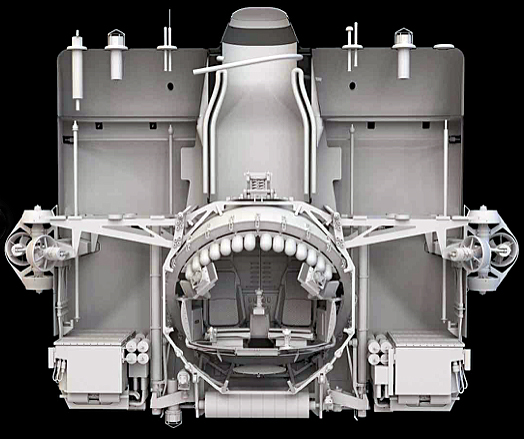
Triton 36000/2 interior view. The spherical titanium pressure vessel for the two-person crew sphere in the center, beneath the access trunk. Thrusters and their support structures are mounted to the pressure vessel. Source: Five Deeps Expedition
Using a Kongsberg EM124 multi-beam echo sounder mounted to the hull of the support vessel DSSV Pressure Drop, the Five Deeps Expedition team created detailed topographical maps of the Challenger Deep before the first of four dives. Dives 1 and 2 were conducted by Vescovo into the Eastern Pool. Dives 3 and 4 were conducted by Triton Submarines President, Patrick Lahey; Dive 3 was into the Eastern Pool and Dive 4 was into the Central Pool. Two days later, Dive 5 was conducted in the Sirena Deep. These five dives were accomplished in eight days. A synopsis of each dive follows:
Dive 1 (28 April 2019): This was the deepest dive of the mission and the deepest dive in human history. Vescovo reached the bottom at a depth of 10,925 meters ± 6.5 m (35,843 ft ± 21 ft, 10.92 km, 6.79 miles). Time on the bottom was 248 minutes. Note that the maximum depth originally was reported as 10,928 meters ± 10.5 meters, but this was later corrected. See the depth certification here: https://fivedeeps.com/wp-content/uploads/2019/10/Triton-LF-Max-Depth-Confirmation-for-Dives-12-DNV-GL.pdf
Dive 2 (3 May 2019): Vescovo reached a depth of 10,927 meters. Time on the bottom was 217 minutes.
Dive 3 (3 May 2019): This was a commercial certification dive with Patrick Lahey piloting and Jonathan Struwe aboard as a specialist. A Five Deeps Expedition scientific lander that became stuck on bottom during Dive 2 was freed from the bottom and recovered from 10,927 meters by direct action of the manned submersible (deepest salvage operation ever). Time on the bottom was 163 minutes. The submarine passed all of its qualification tests and commercial certification by DNV GL was granted following this dive.
Dive 4 (5 May 1959): This was a scientific dive with Patrick Lahey piloting and John Ramsay (the submarine’s designer) in the second seat. Video surveys were conducted and biological samples were collected. Time on the bottom was 184 minutes.
Dive 5 (7 May 2019): While still in the Mariana Trench area, Lahey conducted the first ever dive into the Sirena Deep, 128 miles (206 km) northeast of the Challenger Deep. On this dive (Dive 5), he reached a depth of 10,714 meters (35,151 ft, 6.66 miles). Time on the bottom was 176 minutes.
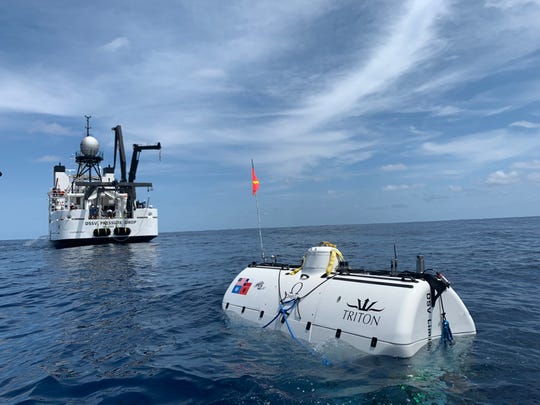
DSV Limiting Factor preparing to dive into the Challenger Deep Source: Triton Submarines LLC
DSV Limiting Factor being recovered by its support ship DSSV Pressure Drop. Source: Five Deeps Expedition
You’ll find a good summary of the five dives in the Challenger Deep and Sirena Deep in the expedition’s press release dated 13 May 2019, “Deepest Submarine Dive in History, Five Deeps Expedition Conquers Challenger Deep,” which is available here:
The entire expedition was filmed by Atlantic Productions for a five-part Discovery Channel documentary series, “Deep Planet.”
Into the future
The Triton 36000/2 Limiting Factor is the only submersible that is commercially certified for repeated exploration to the deepest points in the ocean. It is the only insurable, full ocean depth (FOD) manned submersible in the world. The official certification of the vessel to FOD is overseen by an independent third party, the world-standard credentialer of maritime vessels DNV-GL (Det Norske Veritas Germanischer Lloyd).
The manufacturer, Triton Submarines LLC, located in Vero Beach, Florida reported:
“Designed and certified to make thousands of dives to Hadal depths, during decades of service, Triton is excited to offer the opportunity for a private individual, government or philanthropic organization or research institute to acquire this remarkable System and continue the adventure.”
“Available to purchase today for $48.7 million, the Triton 36,000/2 Hadal Exploration System will be ready for delivery in 2019, after its successful (Five Deeps) expedition. The System will be fully proven. It will have extended the boundaries of human endeavor and technology. And it will offer a unique deep-diving capability unmatched by any nation or organization in the world.”
The idea of extracting energy from wave motion in the open ocean is not a new one. This energy source is renewable and relatively persistent in comparison to wind and solar power. However, no commercial-scale wave power generator currently is in operation anywhere in the world. The primary issues hindering deployment of this technology are:
the complexity of harnessing wave power
the long-term impact of the harsh ocean environment (storms, constant pounding from the sea, corrosive effects of salt water) on the generating equipment
the high cost of generating electricity from wave power relative to almost all other energy sources, including wind and solar
In April 2014, Dave Levitan posted an article entitled, “Why Wave Power Has Lagged Far Behind as Energy Source,” on the Environment360 website. You can read this article at the following link:
You’ll find a June 2014 presentation entitled, “Wave Energy Technology Brief,” by the International Renewable Energy Agency (IRENA) at the following link:
The general consensus seems to be that the wave energy industry is at about the same level of maturity as the wind and solar energy industries were about 30 years ago, in the 1980s.
Several U.S. firms offer autonomous floating devices that are capable of extracting energy from the motion of ocean waves and generating usable, persistent, renewable electric power. Two of the leaders in this field are Ocean Power Technologies, Inc. (OPT) in Pennington, NJ (with subsidiaries in the UK and Australia) and Northwest Energy Innovations, LLC (NWEI) in Portland, OR. Let’s take a look at their products
Ocean Power Technologies, Inc. (OPT)
OPT (http://www.oceanpowertechnologies.com) is the developer of the PowerBuoy®, which is a moored ocean buoy that extracts energy from the heave (vertical motion) of ocean waves and converts this into electrical energy for marine applications (i.e., offshore oil, gas, scientific and military applications) or for distribution to onshore facilities and/or connection to an onshore electric power grid. OPT currently offers PowerBuoy® in two power output ranges: up to 350 watts and up to 15 kW.
Source: OPT
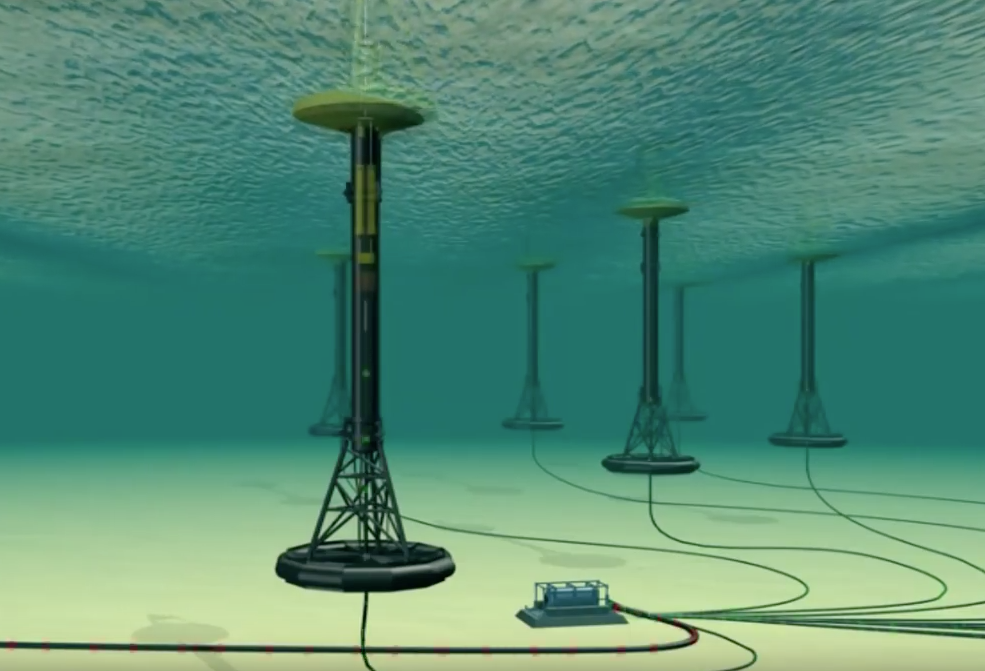
The modest output from individual PowerBuoys® can be combined via an Undersea Substation Pod into a scalable wave farm to deliver significant power output to the intended user.
OPT wave farm concept. Source: OPT
You’ll find a description of PowerBuoy® design and operation on the OPT website at the following link:
“The PowerBuoy consists of a float, spar, and heave plate as shown in the (following) schematic…… The float moves up and down the spar in response to the motion of the waves. The heave plate maintains the spar in a relatively stationary position. The relative motion of the float with respect to the spar drives a mechanical system contained in the spar that converts the linear motion of the float into a rotary one. The rotary motion drives electrical generators that produce electricity for the payload or for export to nearby marine applications using a submarine electrical cable. This high performance wave energy conversion system generates power even in moderate wave environments.
The PowerBuoy’s power conversion and control systems provide continuous power for these applications under the most challenging marine conditions. The spar contains space for additional battery capacity if required to ensure power is provided to a given application even under extended no wave conditions.”
Source: OPT
On the OPT website, you’ll find several technical presentations on the PowerBuoy® at the following link:
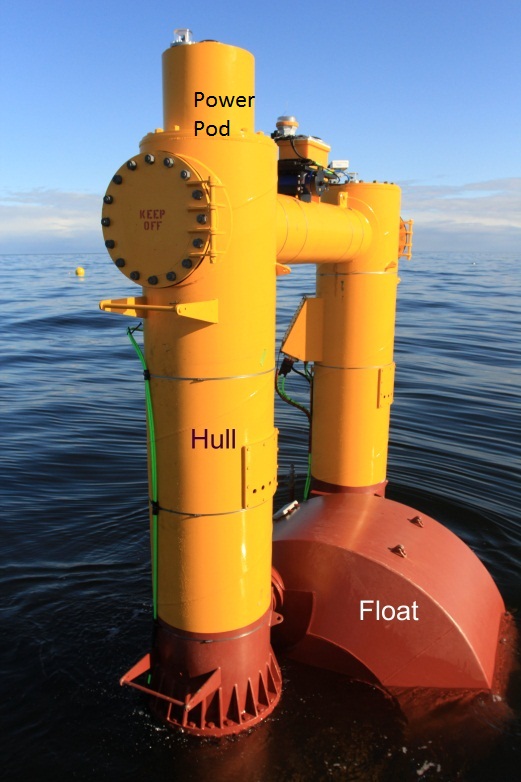
NWEI (http://azurawave.com) is the developer of the Azura™ wave energy device, which is a moored ocean buoy that extracts power from both the heave (vertical motion) and surge (horizontal motion) of waves to maximize energy extraction. Electric power is generated by the relative motion of a rotating / oscillating float and the hull of the Azura™ wave energy device.
Source: NWEI
You can see a short video on the operating principle of the Azura™ wave energy device at the following link:
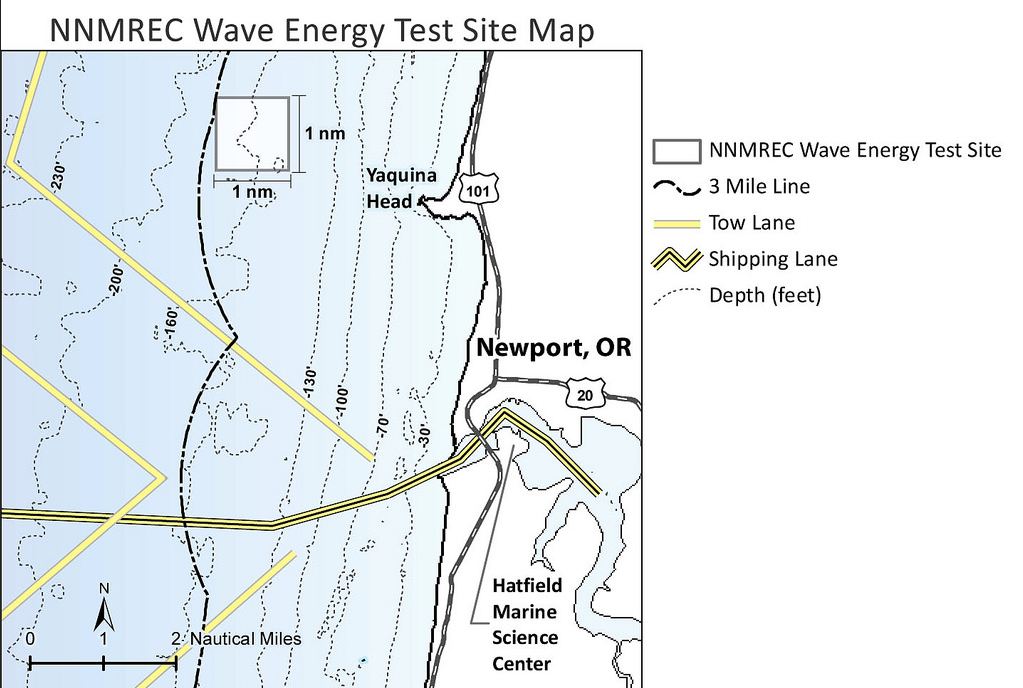
In 2012, the Azura prototype was fabricated and deployed at the Northwest National Marine Renewable Energy Center (NNMREC) ocean test site offshore from Newport, OR.
Source: flickr / Oregon State University
On May 30, 2015, under a Department of Energy (DOE) and U.S. Navy sponsored program, NWEI deployed the improved Azura™ prototype at the Navy’s Wave Energy Test Site at the Marine Corps Base, Kaneohe Bay, Oahu, Hawaii. The Azura prototype extends 12 feet above the surface and 50 feet below the surface. It generates up to 18 kW of electricity.
Source: NWEI
You can view a short video on the Azura being installed at the offshore site in Kaneohe Bay at the following link:
In September 2016, the Azura™ prototype reached a notable milestone when it became the first wave-powered generator connected to a U.S. commercial power grid.
Conclusions
I think we all can all agree that the technology for wave-generated power still is pretty immature. The cost of wave-generated power currently is very high in comparison to most alternatives, including wind and solar power. Nonetheless, there is a lot of energy in ocean waves and the energy density can be higher than wind or solar. As the technology matures, this is an industry worth watching, but you’ll have to be patient.
The National Academies Press (NAP) recently published the report, “A Strategic Vision for NSF Investments in Antarctic and Southern Ocean Research”, which you can download for free at the following link if you have established a MyNAP account:
NSF states that research on the Southern Ocean and the Antarctic ice sheets is becoming increasingly urgent not only for understanding the future of the region but also its interconnections with and impacts on many other parts of the globe. The research priorities for the next decade, as recommended by the Committee on the Development of a Strategic Vision for the U.S. Antarctic Program; Polar Research Board; Division on Earth and Life Studies; National Academies of Sciences, Engineering, and Medicine, are summarized below:
Core Program: Investigator-driven basic research across a broad range of disciplines
NSF gives the following rationale: “…it is impossible to predict where the next major breakthroughs or advances will happen. Thus to ensure that the nation is well positioned to take advantage of such breakthroughs, it is important to be engaged in all core areas of scientific research.”
NSF notes, “…discoveries are often made by single or small groups of PIs thinking outside the box, or with a crazy new idea, or even just making the first observations from a new place.”
Examples of basic research that have led to important findings include:
Ross Sea food chain is affected by a high abundance of predator species (whales, penguins and toothfish) all competing for the same limited resource: krill. Decline or recovery of one predator population can be seen in an inverse effect on the other predator populations. This food chain response is not seen in other areas of the Antarctic ice shelf where predator populations are lower, allowing a larger krill population that adequately supports all predators.
Basic research into “curious” very-low frequency (VLF) radio emissions produced by lightning discharges led to a larger program (with a 21.2-km-long VLF antenna) and ultimately to a better understanding of the behavior of plasma in the magnetosphere.
Strategic, Large Research Initiatives – selection criteria:
Primary filter: compelling science – research that has the potential for important, transformative steps forward in understanding and discovery
Subsequent filters: potential for societal impact; time-sensitive in nature; readiness / feasibility; and key area for U.S. and NSF leadership.
Additional factors: partnership potential; impact on program balance; potential to help bridge existing disciplinary divides
Strategic, Large Research Initiative – recommendations::
Priority I: The Changing Antarctic Ice Sheets Initiative to determine how fast and by how much will sea level rise?
A multidisciplinary initiative to understand why the Antarctic ice sheets is changing now and how they will change in the future.
Will use multiple records of past ice sheet change to understand rates and processes.
Priority II: How do Antarctic biota evolve and adapt to the changing environment?
Decoding the genomic (DNA) and transcriptomic (messenger RNA molecules) bases of biological adaptation and response across Antarctic organisms and ecosystems.
Priority III: How did the universe begin and what are the underlying physical laws that govern its evolution and ultimate fate?
A next-generation cosmic microwave background (CBM) program that builds on the current successful CMB program using telescopes at the South Pole and the high Atacama Plateau in Chile and possibly will add a new site in the Northern Hemisphere to allow observations of the full sky
You will find detailed descriptions of the Priority I to III strategic programs in the Strategic Vision report.
A new book by the above title has been published by The National Academies Press (NAP).
Source: NAP
As described in the NAP abstract for this book:
In the United States, the National Science Foundation (NSF) is the primary funder of the basic research which underlies advances in our understanding of the ocean. Sea Change addresses the strategic investments necessary at NSF to ensure a robust ocean scientific enterprise over the next decade. This survey provides guidance from the ocean sciences community on research and facilities priorities for the coming decade and makes recommendations for funding priorities.
If you have set up a MyNAP account as described in my 14 March 2015 post, then you can download a pdf copy of this book for free at the following link: