Peter Lobner
The DARPA Robotics Challenge (DRC) Finals held in June 2015 demonstrated the rather limited capabilities for state-of-the-art robots, all of which required teleoperators (remote operators) to augment limited autonomous capabilities aboard the robots. One criticism of that competition was that the original rules got watered down because of the limitations of the robot competitors. Performance of the robots could be characterized as slow and deliberate. None of the robotic competitors that fell over could get up and one was decapitated by the fall. Here’s a video compilation of robots falling during the 2015 DARPA finals:
https://www.youtube.com/watch?v=g0TaYhjpOfo
Team KAIST won the competition with their Hubo robot, which didn’t fall, but wasn’t designed to recover from a fall. Team IHMS Robotics placed second in the competition with their Running Man robot, which was based on the Boston Dynamics Atlas robot. Several other teams also based their entries on the Atlas robot. See my 2 July 2015 post on the DRC Finals.
In February 2016, Boston Dynamics posted a video of a new version of their Atlas robot, which they describe as follows:
“A new version of Atlas, designed to operate outdoors and inside buildings. It is specialized for mobile manipulation. It is electrically powered and hydraulically actuated. It uses sensors in its body and legs to balance and LIDAR (Light Imaging, Detection And Ranging) and stereo sensors in its head to avoid obstacles, assess the terrain, help with navigation and manipulate objects. This version of Atlas is about 5′ 9″ tall (about a head shorter than the DRC Atlas) and weighs 180 lbs.”
 New version of Atlas. Source: Boston Dynamics
New version of Atlas. Source: Boston Dynamics
The autonomous balancing capabilities of this new version, especially its ability to recovery from upsets, seem significantly better than anything seen during the DRC. Atlas recovered nicely from the slip in the above photo. You can see the new version of Atlas perform in the Boston Dynamics video at the following link:
https://www.youtube.com/watch?v=rVlhMGQgDkY
Another interesting new robot from Boston Dynamics is the quadruped SpotMini, which they describe as follows:
“SpotMini is a new smaller version of the Spot robot, weighing 55 lbs. dripping wet (65 lbs. if you include its arm.) SpotMini is all electric (no hydraulics) and runs for about 90 minutes on a charge, depending on what it is doing. SpotMini is one of the quietest robots we have ever built. It has a variety of sensors, including depth cameras, a solid state gyro (IMU, inertial measuring unit) and proprioception sensors in the limbs. These sensors help with navigation and mobile manipulation. SpotMini performs some tasks autonomously, but often uses a human for high-level guidance.”
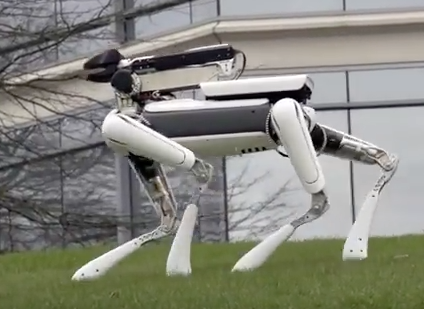 SpotMini. Source: Boston Dynamics
SpotMini. Source: Boston Dynamics
On 23 June 2016, Boston Dynamics posted the following short video of SpotMini in action.
https://www.youtube.com/watch?v=tf7IEVTDjng
Google acquired Boston Dynamics in late 2013. Since then, Google was reorganized, with the “parent firm”, Alphabet, being created in 2015. Shortly thereafter, Google’s research and development group, formerly Google(x), was renamed simply X, or Google X. This group includes a robotics team known as Replicant.
In March 2016, Google announced that Boston Dynamics was up for sale. One reason appears to be that the Boston Dynamics robotics work did not fit in the business model planned for Google X, which has a greater focus on relatively near-term return on investment in the form of a marketable products. You can read an interesting article on Boston Dynamics being put sale at the following link to the Bloomberg Technology website:
In late May and early June 2016, several sources (Nikkei, Tech Insider, and engadget) reported that Toyota was negotiating with Alphabet for the sale of Boston Dynamics. Also part of this sale may be Google’s Japanese robotics company, Schaft, which won the 2013 DRC Trials with its S-One humanoid robot. Schaft withdrew from the 2015 DRC Finals for the declared reason of wanting to focus on commercial products. See the article on the engadget website at the following link:
https://www.engadget.com/2016/06/01/toyota-alphabet-boston-dynamics/
It will be interesting to see how and when the sales of Boston Dynamics and Schaft are completed. If these firms do wind up being bought by Toyota, then Toyota’s Research Institute should become a very powerful center for robotic development.
