Peter Lobner
Updated 4 September 2015 and 16 February 2016
Along San Diego Bay, you’ll see a great variety of military and civilian vessels. The San Diego Port District has posted a chart on Shelter Island to help tourists and locals identify the more common types of Navy ships that are based here. Occasionally, you might be treated to the sight of an uncommon vessel, such as the catamaran USNS Minninocket (JHSV-3), shown below. This ship is owned and operated for the Navy by the Military Sealift Command.
 Source: Author photo
Source: Author photo
 Source: Author photo
Source: Author photo
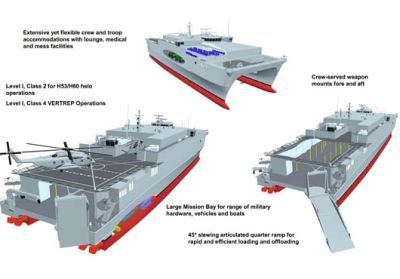
JHSV ships are fast, modest-sized, non-combatant vessels designed to transport about 600 tons troops and equipment. Their modular design enables rapid reconfiguration of the 20,000-ft2 cargo bay to support various missions. For example, a JHSV vessel can accommodate an Army or Marine Corps company-sized unit (typically 80 – 250 troops) and vehicles, or be reconfigured to transport up to 312 troops.
The vessel has a length of 338′ (103 m), a beam of 93’ 6” (28.5 m), and a draft of 12’ 7” (3.83 m), and a displacement of about 2,400 tons. The catamaran design of the hull and the location of the large cargo deck are evident in the following pictures:
 Source: U.S. Navy
Source: U.S. Navy
 Source: U.S. Navy
Source: U.S. Navy
Ship propulsion is provided by four 12,200 hp (9.1 MW) diesel engines in the catamaran pods driving waterjets that deliver a maximum speed of about 43 kts. Range is about 1,200 miles at 35 kts. The ship has facilities for one helicopter. As of the FY 2015 budget, 11 JHSVs have been funded.
You can read a summary of this Navy ship program, including the status of resolving FY 2013 and FY 2014 recommendations for improvement and new FY 2015 recommendations, at the following link:
http://www.dote.osd.mil/pub/reports/FY2015/pdf/navy/2015jhsv.pdf
You can watch a short video on this intriguing vessel at the following link:
https://www.youtube.com/watch?v=aWRNIXNGGjA
In 2016, the Navy plans to conduct shipboard tests of the BAE Systems prototype electromagnetic railgun aboard USNS Trenton (JHSV-5), including live firing GPS-guided hyper-velocity projectiles (HVP) at targets 20 miles or more away. While the JHSV is a non-combatant, it was chosen for this test program because of the availability of adequate space in the cargo hold and topside for the prototype weapon system. An artist rendering of the planned railgun installation is shown below.
 Source: U.S. Navy
Source: U.S. Navy
4 September 2015 update: Joint High-speed Vessel (JHSV) redesigned Expeditionary Fast Transport (EPF)
Now there’s a new root designator for U.S. Navy vessels: “E” for “expeditionary support.”
Navy Secretary Ray Mabus and Adm. Jon Greenert, Chief of Naval Operations, changed the designations of three kinds of ships to the new expeditionary support category. The JHSV joint high-speed vessels will become EPF, for expeditionary fast transport.
16 Feb 2016 Update: EPFs require structural upgrades to cope with heavy seas; operational suitability in question
The Navy has contracted for 10 of the shallow-draft Expeditionary Fast Transports (EPFs) from Austal USA, which constructs these ships at its Mobile, AL shipyard. Five EPFs have been delivered and have made deployments to Africa, the Middle East and the Far East. The 6th ship, USNS Brunswick, was just delivered to the Navy on 14 January 2016. Four more ships (EPF-7 to EPF-10) remain to be delivered under the current contract. EPF-11 and -12 have been funded by Congress in the 2015 and 2016 omnibus appropriations bills, but contracts with the Navy remain to be finalized.
Operating as part of the U.S. Navy’s Military Sealift Command, EPFs are intended primarily for use in littoral waters. However, they are expected to be able to make fast open ocean transits and operate with other Navy units in the open ocean.
The lead ship, USNS Spearhead, was damaged in moderate seas while transiting the Atlantic en route to Europe in September 2014. The ship took a significant pounding from wave slamming onto the “forepeak”, which is the bottom of the foremost part of the flat hull section spanning the two catamaran hulls. Repairs to the ship cost about $511,000. The repairs included structural reinforcement of the bow, which added 1,736 pounds to the ship’s weight and displaced about 250 gallons of fuel.
 Source: U.S. Navy
Source: U.S. Navy
On 22 September 2015, Michael Gilmore, Director, Operational Test and Evaluation, issued the following report to the Secretary of Defense: “Follow-on Operational Test and Evaluation (FOT&E) Report on the Joint High Speed Vessel (JHSV).”
Key points in this report related to the weak bow are:
- There is a serious problem with the bow structure related to the ship’s Safe Operating Envelope (SOE), which is designed to limit wave impact loads on the bow structure.
- The Navy accepted compromises in the bow structure during construction of these ships.
- Multiple ships of the class have suffered damage to the bow structure, and repairs/reinforcements are in progress class-wide.
- Operating the ship outside of the SOE or encountering a rogue wave that is outside of the current sea state limits can result in sea slam events that cause structural damage to the bow structure of the ship.
- The SOE operational restrictions are major limitation that must be accounted for in all missions assigned to these ships. The following limits apply:
- At Sea State 3 or less (significant wave height up to 1.25 meters), the ship may operate up to its maximum speed
- At Sea State 4 (significant wave height up to 2.5 meters) the ship must slow to 15 knots.
- At Sea State 5 (significant wave height up to 4 meters) the ship must slow to 5 knots.
- Above Sea State 5, the ship can only hold position and await calmer seas.
- The Navy has spent almost $2.4 million strengthening the bows of the first four vessels delivered since late 2012.
- The 5th operating ship, the USNS Trenton, will be modified during its next planned shipyard visit.
- Later EPFs will be modified during construction, before delivery to the Navy.
- There has been no heavy weather testing yet to verify if the fixes are sufficient.
In addition to the bow structural problems, Michael Gilmore’s report noted that the EPFs have the following significant problems:
- The EPF cannot effectively inter-operate with a Mobile Landing Platform in the open ocean.
- Unplanned limitations exist on launching a SEAL Delivery Vehicle (SDV) and associated support boats in the open ocean
- Operational availability is limited primarily by the poor reliability of the Ship Service Diesel Generators, waterjets, and the Ride Control System (RCS).
You can download Michael Gilmore’s complete report at the following link:
Short summary articles on these matters are available at the following links to Bloomberg Business and Seapower:
and
http://www.seapowermagazine.org/stories/20151019-epf.html
Severe ship damage from very high sea states and rogue waves is always a possibility for ships operating in the open ocean. However, the bow damage experienced by the EPFs operating in the open ocean points to underlying design and operational issues for this type of ship.
For additional commentary on problems associated with bow damage to vessels operating in the open ocean, I refer you to the short video at the following link: