Peter Lobner
Lunar Lander XCHALLENGE and Lunar XPrize are two competitions promoting the development of technologies, vehicles and systems by private firms for landing unmanned vehicles on the Moon and demonstrating functional capabilities that can support future lunar exploration missions. The legal and regulatory framework for U.S. commercial space activities was greatly simplified in November 2015, when the Commercial Space Launch Competitiveness Act was signed into law. See my 31 December 2015 post for details on this Act.
On 3 August 2016, Lunar XPrize competitor Moon Express became the first private enterprise to be licensed by the U.S. Government (the Federal Aviation Administration) to conduct a mission to the lunar surface. Other Lunar XPrize competitors also are seeking similar approvals in preparation for lunar missions before the end of 2017.
Let’s take a look at how the private sector got this far.
Northrop Grumman / NASA Lunar Lander XCHALLENGE
In October 2007, XPrize and Northrop Grumman, in partnership with NASA’s Centennial Challenges program, launched the $2 million Lunar Lander XCHALLENGE, in which competing teams designed small rocket vehicles capable of routine and safe vertical takeoff and landing for lunar exploration and other applications. You’ll find details on the Lunar Lander XChallenge at the following link and an overview in the following text:
http://lunarlander.xprize.org
 Source: XPrize
Source: XPrize
The XCHALLENGE was divided into two levels.
Level 1:
- Required a rocket to take off from a designated launch area; climb to a low, fixed altitude of about 50 meters (164 feet); and fly for at least 90 seconds while translating horizontally to a precise landing point on a different landing pad 100 meters (328 feet) from the launch point. The flight must be repeated in reverse within a two and a half hour period.
- Armadillo Aerospace, of Mesquite, TX won the $350K Level 1 first prize in October 2008. Masten Space Systems of Mojave, CA won the $150K Level 1 second place prize on 7 October 2009 when their Xombie rocket completed its flight with an average landing accuracy of 6.3 inches (16 cm).
- You can watch a short video on the 2008 Level 1 competition and Armadillo Aerospace’s winning Level 1 flight at the following link:
https://www.youtube.com/watch?v=IhnY5tT4YeE
 Armadillo Aerospace Level 1 winner. Source: NASA
Armadillo Aerospace Level 1 winner. Source: NASA
Level 2:
- Similar to the Level 1 flight profile, but required the rocket to fly for 180 seconds before landing precisely on a simulated lunar surface constructed with craters and boulders 100 meters (328 feet) from the launch point. The minimum flight time was calculated so that the Level 2 mission closely simulated the power needed to perform a real descent from lunar orbit down to the surface of the Moon.
 Level 2 landing site. Source: NASA
Level 2 landing site. Source: NASA
- Masten Space Systems won the $1M Level 2 first prize with the flight of their Xoie rocket on 30 October 2009. Xoie completed its Level 2 flight with an average landing accuracy of about 7.5 inches (19 cm). Armadillo Aerospace took second place and a $500K prize with the 12 September 2009 flight of their Scorpius (Super-mod) rocket, which had an average landing accuracy of about 34 inches (89 cm). These prizes were awarded on 5 November 2009 in Washington D.C.
 Masten Aerospace Xoie: Level 2 winner. Source: NASA.
Masten Aerospace Xoie: Level 2 winner. Source: NASA.
- You can watch a short video summary on the XCHALLENGE results, including the winning flight by Xoie at the following link:
https://www.youtube.com/watch?v=MAvZxa1VXKI
 Armadillo Aerospace’s Scorpius: Level 2 second place. Source: NASA
Armadillo Aerospace’s Scorpius: Level 2 second place. Source: NASA
- You can watch a short video on the Scorpius 2009 flight at the following link:
https://www.youtube.com/watch?v=ALKvai4p7OE
The other XCHALLENGE competitors, TrueZer0 and Unreasonable Rockets, failed to qualify for Level 1 or 2.
Google Lunar XPrize
The Google Lunar XPrize was created in 2007, overlapping with the Northrop Grumman / NASA Lunar Lander XCHALLENGE. The Lunar XPrize is intended to actually deliver payloads to the Moon and “incentivize space entrepreneurs to create a new era of affordable access to the Moon and beyond.” The motto for the Google XPrize is: “Back to the Moon for good.”
The basic mission requirements are:
- Land a privately funded rover on the Moon at a site announced in advance.
- Travel at least 500 meters along a deliberate path on the lunar surface.
- Transmit two “Mooncasts” from the surface of the Moon, including specified types of videos and still images.
- Receive specified data uplinks from Earth and re-transmit the data back to Earth.
- Deliver a small payload provided by XPrize (not to exceed 500 grams).
- Private funding for 90% of the total mission cost. No more than 10% government funding, including the value of in-kind support.
- Launch contract in place by the end of 2016 and mission completion by the end of 2017.
The primary incentives are large financial award to the first and second teams that accomplish all of the mission requirements: $20 million Grand Prize and $5 million for second place. In addition, there are several other financial prizes that add up to total awards of more than $40 million. Of course, the winner will have bragging rights for a long time to come.
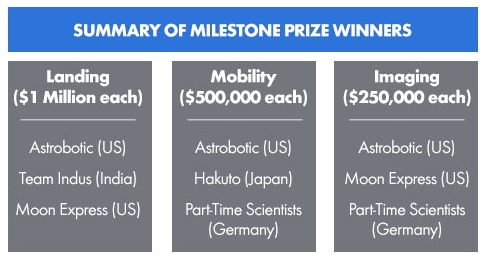
- Milestone prizes: $5.25 million already has been awarded to teams that demonstrated robust hardware in three categories: landing, mobility, and imaging. The following Milestone prize winners have been announced:
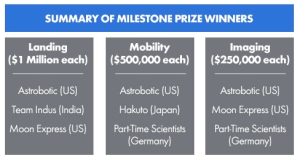 Source: XPrize
Source: XPrize
- Bonus prizes: Up to $4 million for successfully completing additional scientific and technical tasks not in the mission requirements
- Apollo Heritage Bonus Prize: $4 million for making an Apollo Heritage Mooncast from the site of an Apollo moon landing.
- Heritage Bonus Prize: $1 million for making a Mooncast from another site of interest to XPrize.
- Range Bonus Prize: $2 million for a rover that can traverse five kilometers on the Moon’s surface.
- Survival Bonus Prize: $2 million for successfully operating on two separate lunar days.
- Water Detection Bonus Prize: $4 million for producing scientifically conclusive proof of the presence of water on the Moon.
The Google Lunar XPrize home page is at the following link, where you can navigate to many details on this competition and sign up for an XPrize newsletter:
http://lunar.xprize.org
The Google Lunar XPrize began with 29 teams and now 16 remain. As noted above, five teams already have won Milestone prizes.
The three teams that competed in the landing milestone competition are taking different approaches. Astrobotics is using a lunar lander developed by Masten Aerospace. Indus and Moon Express are developing their own lunar landers.
So far, only two teams have launch contracts:
- On 7 October 2015, the Israeli team SpaceIL became the first Lunar XPrize team to sign a launch contract. They signed a launch services contract with Spaceflight Industries for launch on a SpaceX Falcon 9 launcher in the second half of 2017.
- On 8 December 2017, XPrize verified the Moon Express launch contract with Rocket Lab USA. Moon Express contracted for three launches using an Electron booster, which, as of mid-2016, is still being developed.
By the end of 2016, all competitors that intend to continue into the finals must have a launch contract in place.
So far, only three nations have made a soft landing on the Moon: USA, Russia and China. In 2017, a privately funded team may be added to that list. That would be a paradigm shift for lunar exploration, opening the door for private teams and commercial firms to have regular, relatively low cost access to the Moon.
Update 23 December 2016: Google Lunar XPrize Status
On 22 December 2016, author Daniel Clery posted an article, “Here’s who could win the $20 million XPrize for roving on the moon—but will any science get done?” The author reports that six teams claim to have booked flights to the moon for their lunar landers / rovers. The following chart provides a summary for five of the competitors. The small (4 kg) rover for the sixth competitor, Japan’s Team Hakuto, will be delivered to the moon on the same lander as India’s Team Indus.
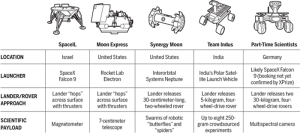
Click on the graphic above to enlarge. Source: G. Grullón/Science
As I noted previously, all competitors that intend to continue into the Lunar XPrize finals must have a launch contract in place by the end of 2016, and the mission to the moon must be completed by the end of 2017.
You can read Daniel Clery’s complete article on the Sciencemag.org website, at the following link:
http://www.sciencemag.org/news/2016/12/heres-who-could-win-20-million-xprize-roving-moon-will-any-science-get-done?utm_campaign=news_daily_2016-12-22&et_rid=215579562&et_cid=1068715
Update 23 January 2018: Google Lunar XPrize Competion Cancelled
After concluding that none of the remaining competitors could meet the extended 31 March 2018 deadline for landing on the Moon, this competition came to a close, with the $30M in prizes remaining unclaimed.
 The completed sarcophagus at left end of the 4-unit Chernobyl nuclear plant. Source: chernobylgallery.com
The completed sarcophagus at left end of the 4-unit Chernobyl nuclear plant. Source: chernobylgallery.com Close-up of the sarcophagus. Source: chernobylgallery.com
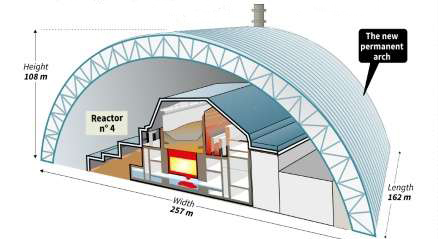
Close-up of the sarcophagus. Source: chernobylgallery.com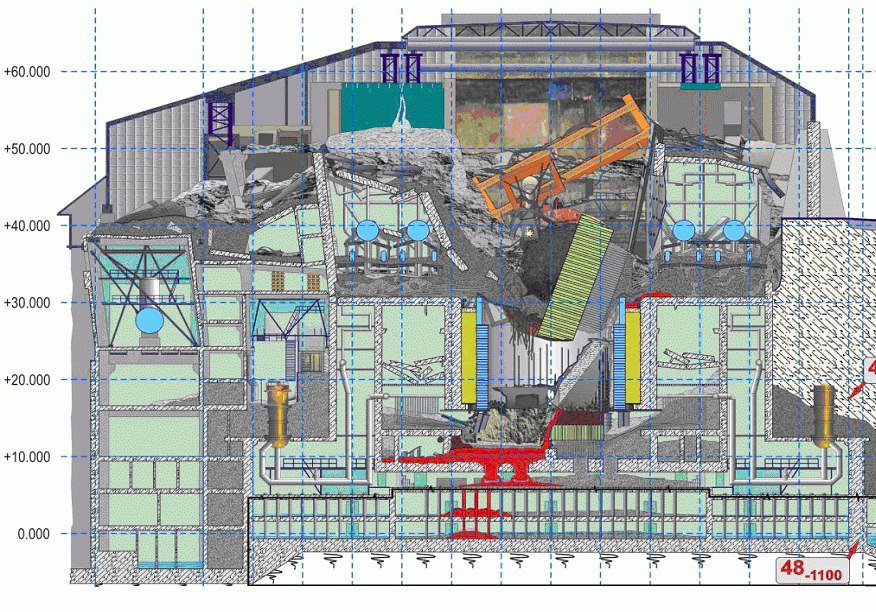 Cross-section of the sarcophagus. Source: chernobylgallery.com
Cross-section of the sarcophagus. Source: chernobylgallery.com NSC exterior view. Source: EBRD
NSC exterior view. Source: EBRD