After the failure of Israel’s Beresheet spacecraft to execute a soft landing on the Moon in April 2019, India is the next new contender for lunar soft landing honors with their Chandrayaan-2 spacecraft. We’ll take a look at the Chandrayaan-2 mission in this post.
1. Background: India’s Chandrayaan-1 mission to the Moon
India’s first mission to the Moon, Chandrayaan-1, was a mapping mission designed to operate in a circular (selenocentric) polar orbit at an altitude of 100 km (62 mi). The Chandrayaan-1 spacecraft, which had an initial mass of 1,380 kg (3,040 lb), consisted of two modules, an orbiter and a Moon Impact Probe (MIP). Chandrayaan-1 carried 11 scientific instruments for chemical, mineralogical and photo-geologic mapping of the Moon. The spacecraft was built in India by the Indian Space Research Organization (ISRO), and included instruments from the USA, UK, Germany, Sweden and Bulgaria.
Chandrayaan-1 was launched on 22 October 2008 from the Satish Dhawan Space Center (SDSC) in Sriharikota on an “extended” version of the indigenous Polar Satellite Launch Vehicle designated PSLV-XL. Initially, the spacecraft was placed into a highly elliptical geostationary transfer orbit (GTO), and was sent to the Moon in a series of orbit-increasing maneuvers around the Earth over a period of 21 days. A lunar transfer maneuver enabled the Chandrayaan-1 spacecraft to be captured by lunar gravity and then maneuvered to the intended lunar mapping orbit. This is similar to the five-week orbital transfer process used by Israel’s Bersheet lunar spacecraft to move from an initial GTO to a lunar circular orbit.
The goal of MIP was to make detailed measurements during descent using three instruments: a radar altimeter, a visible imaging camera, and a mass spectrometer known as Chandra’s Altitudinal Composition Explorer (CHACE), which directly sampled the Moon’s tenuous gaseous atmosphere throughout the descent. On 14 November 2008, the 34 kg (75 lb) MIP separated from the orbiter and descended for 25 minutes while transmitting data back to the orbiter. MIP’s mission ended with the expected hard landing in the South Pole region near Shackelton crater at 85 degrees south latitude.
In May 2009, controllers raised the orbit to 200 km (124 miles) and the orbiter mission continued until 28 August 2009, when communications with Earth ground stations were lost. The spacecraft was “found” in 2017 by NASA ground-based radar, still in its 200 km orbit.
Numerous reports have been published describing the detection by the Chandrayaan-1 mission of water in the top layers of the lunar regolith. The data from CHACE produced a lunar atmosphere profile from orbit down to the surface, and may have detected trace quantities of water in the atmosphere. You’ll find more information on the Chandrayaan-1 mission at the following links:
2. India’s upcoming Chandrayaan-2 mission to the Moon
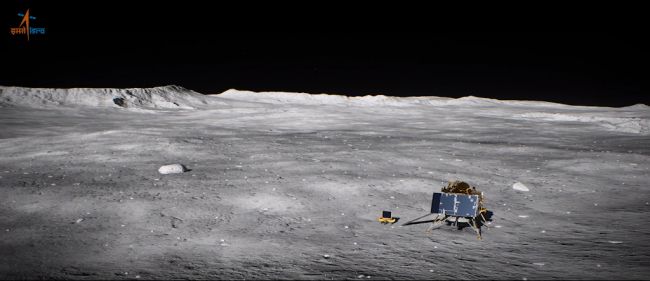
Chandrayaan-2 was launched on 22 July 2019. After achieving a 100 km (62 mile) circular polar orbit around the Moon, a lander module will separate from the orbiting spacecraft and descend to the lunar surface for a soft landing, which currently is expected to occur in September 2019, after a seven-week journey to the Moon. The target landing area is in the Moon’s southern polar region, where no lunar lander has operated before. A small rover vehicle will be deployed from the lander to conduct a 14-day mission on the lunar surface. The orbiting spacecraft is designed to conduct a one-year mapping mission.
Artist’s illustration of India’s lunar lander and the small rover vehicle on the surface of the moon. Source: ISRO
The launch vehicle
India will launch Chandrayaan-2 using the medium-lift Geosynchronous Satellite Launch Vehicle Mark III (GSLV Mk III) developed and manufactured by ISRO. As its name implies, GSLV Mk III was developed primarily to launch communication satellites into geostationary orbit. Variants of this launch vehicle also are used for science missions and a human-rated version is being developed to serve as the launch vehicle for the Indian Human Spaceflight Program.
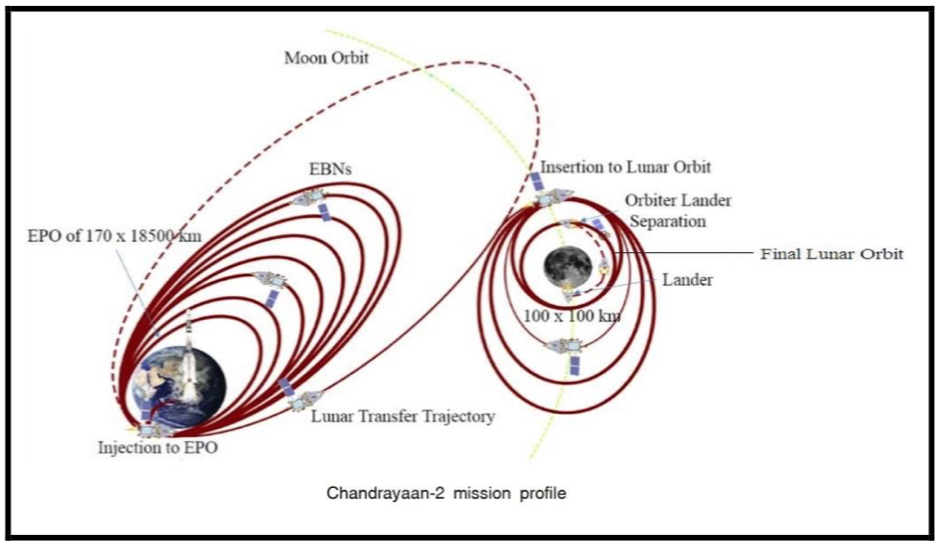
The GSLV III launch vehicle will place the Chandrayaan-2 spacecraft into an elliptical parking orbit (EPO) from which the spacecraft will execute orbital transfer maneuvers comparable to those successfully executed by Chandrayaan-1 on its way to lunar orbit in 2008. The Chandrayaan-2 mission profile is shown in the following graphic. You’ll find more information on the GSLV Mk III on the ISRO website at the following link: https://www.isro.gov.in/launchers/gslv-mk-iii
Source: ISRO
GSLV Mk III D2 on the launch pad at SDSC for the launchof the GSAT-29 communications satellite in 2018.Source: ISRO via Wikipedia
GSLV Mk III D1 lifting off from the SDSCwith the GSAT-19 communications satellite in 2017.Source: ISRO via WikipediaTransporting the partially integrated GSLV MkIII M1 launch vehicle for the Chandrayaan-2 mission on the Mobile Launch Pedestal. Source: ISRO
The spacecraft
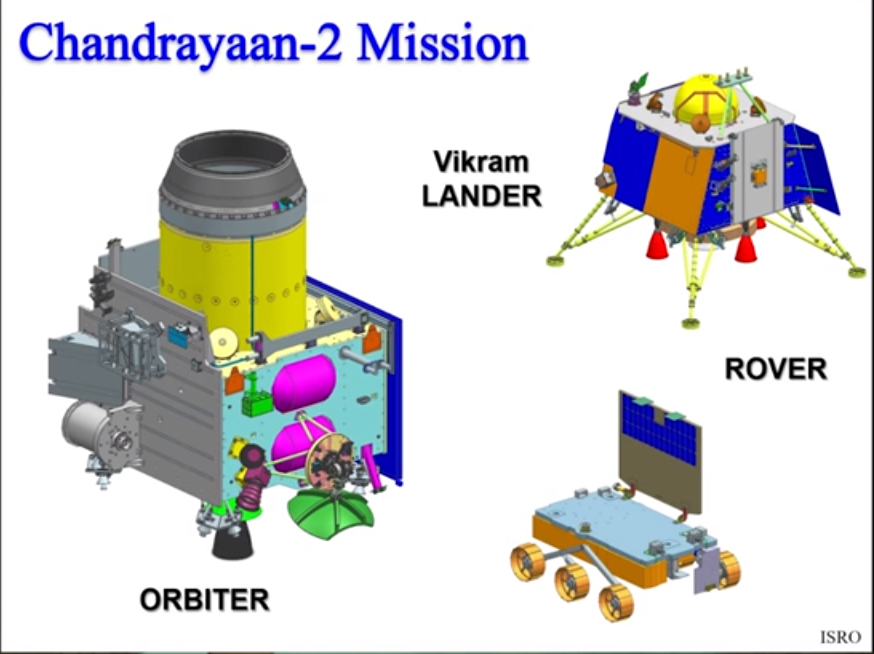
Chandrayaan-2 builds on the design and operating experience from the previous Chandrayaan-1 mission. The new spacecraft developed by ISRO has an initial mass of 3,877 kg (8,547 lb). It consists of three modules: an Orbiter Craft (OC) module, the Vikram Lander Craft (LC) module, and the small Pragyan rover vehicle, which is carried by the LC. The three modules are shown in the following diagram.
Three spacecraft modules (not to scale). Source: ISRO
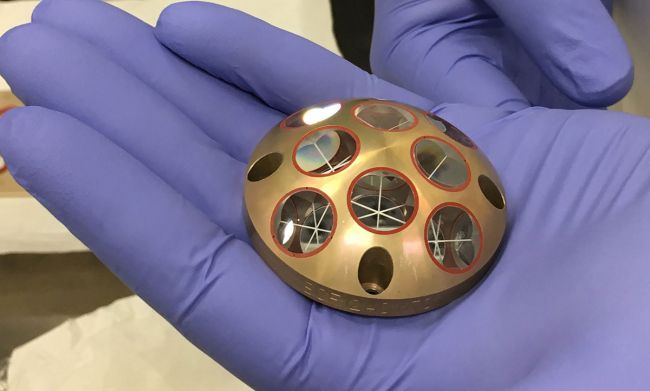
Chandrayaan-2 carries 13 Indian payloads — eight on the orbiter, three on the lander and two on the rover. In addition, the lander carries a passive Laser Retroreflector Array (LRA) provided by NASA.
Laser Retroreflector Array (LRA). Source: ISRO
The OC and the LC are stacked together within the payload fairing of the launch vehicle and remain stacked until the LC separates in lunar orbit and starts its descent to the lunar surface.
Orbiter (bottom) & lander (top) in stacked configuration. Source: ISRO
The solar-powered orbiter is designed for a one-year mission to map lunar surface characteristics (chemical, mineralogical, topographical), probe the lunar surface for water ice, and map the lunar exosphere using the CHACE-2 mass spectrometer. The orbiter also will relay communication between Earth and Vikram lander.
The orbiter. Source: ISRO
The solar-powered Vikram lander weighs 1,471 kg (3,243 lb). The scientific instruments on the lander will measure lunar seismicity, measure thermal properties of the lunar regolith in the polar region, and measure near-surface plasma density and its changes with time.
The Vikram lander with the Pragyan rover on the ramp.Source: ISRO
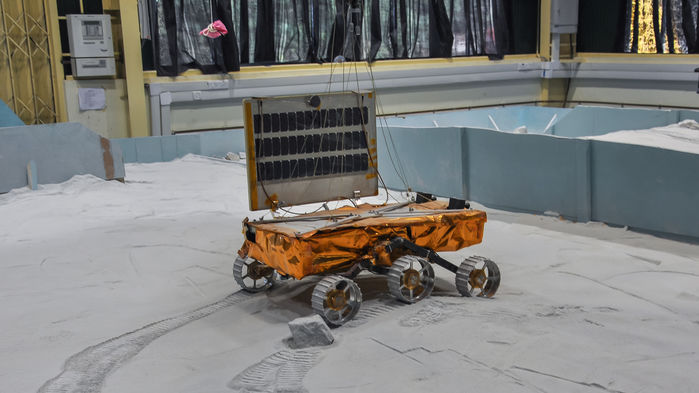
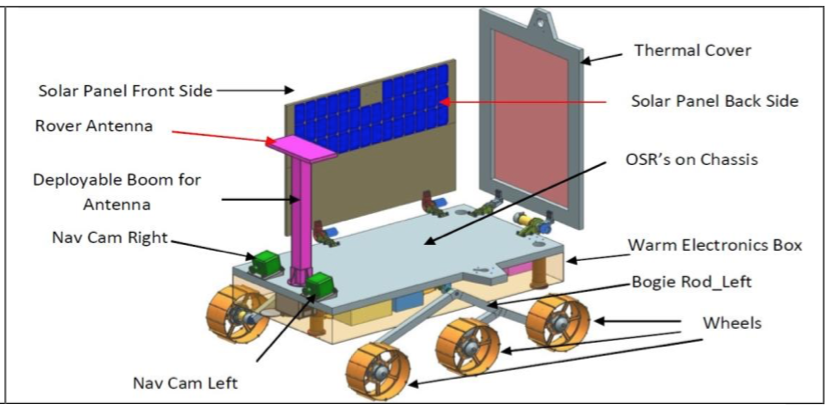
The 27 kg (59.5 lb) six-wheeled Pragyan rover, whose name means “wisdom” in Sanskrit, is solar-powered and capable of traveling up to 500 meters (1,640 feet) on the lunar surface. The rover can communicate only with the Vikram lander. It is designed for a 14-day mission on the lunar surface. It is equipped with cameras and two spectroscopes to study the elemental composition of lunar soil.
Rover during testing. Source: ISRORover details. Source: ISRO
You’ll find more information on the spacecraft in the 2018 article by V. Sundararajan, “Overview and Technical Architecture of India’s Chandrayaan-2 Mission to the Moon,” at the following link:
Best wishes to the Chandrayaan-2 mission team for a successful soft lunar landing and long-term lunar mapping mission.
Update 2 December 2019: Vikram lander crashed on the Moon
After a 48-day transit following launch, and an apparently nominal descent toward the lunar surface, communications with the Vikram lander were lost on 6 September 2019, when the spacecraft was at an altitude of about 2 km (1.2 miles), with just seconds remaining before the planned landing. Communications with the Chandrayaan orbiter continued after communications was lost with the Vikram lander. More details on India’s failed landing attempt are in the 25 November 2019 article on the Space.com website here: https://www.space.com/india-admits-moon-lander-crash.html
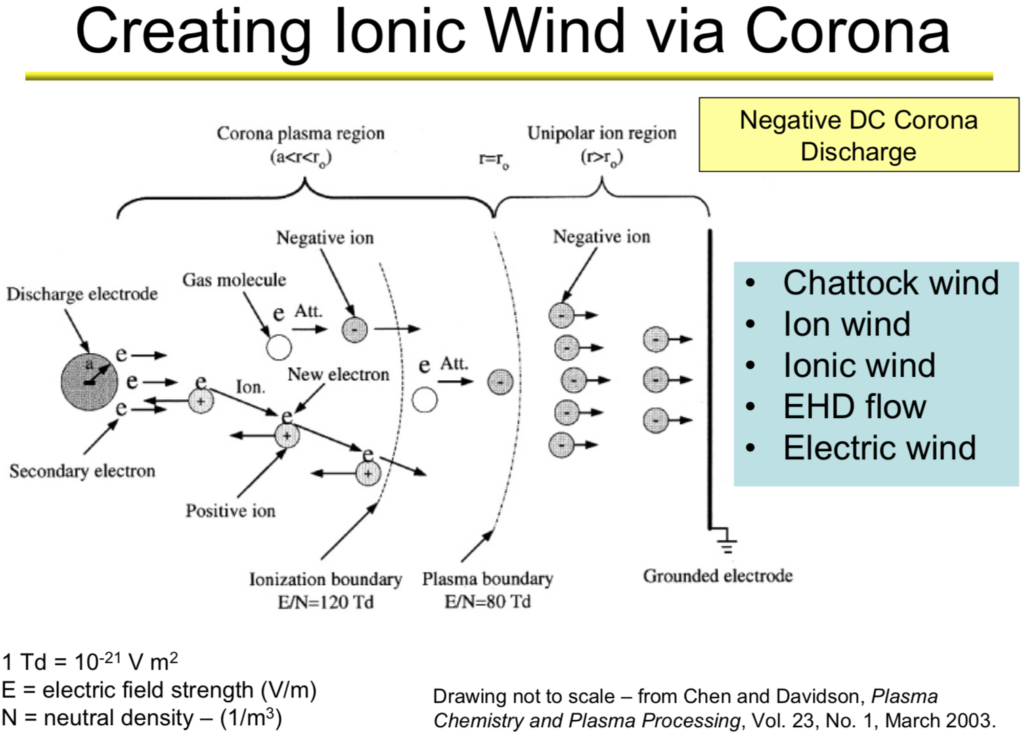
When charged molecules in the air are subjected to an electric field, they are accelerated. When these charged molecules collide with neutral ones, they transfer part of their momentum, leading to air movement known as an “ionic wind.” This basic process is shown in the following diagram, which depicts a strong electric field between a discharge electrode (left) and a ground electrode (right), and the motion of negative ions toward the ground electrode where they are collected. The neutral molecules pass through the ground electrode and generate the thrust called the ionic wind.
This post summarizes work that has been done to develop ionic wind propulsion systems for aircraft. The particular projects summarized are the following:
Major Alexander de Seversky’s Ionocraft vertical lifter (1964)
Michael Walden / LTAS lighter-than-air XEM-1 (1977)
Michael Walden / LTAS lighter-than-air EK-1 (2003)
The Festo b-IONIC Airfish airship (2005)
NASA ionic wind study (2009)
The MIT electroaerodynamic (EAD) heaver-than-air, fixed wing aircraft (2018)
In addition, we’ll take a look at recent ionic propulsion work being done by Electrofluidsystems Ltd., Electron Air LLC and the University of Florida’s Applied Physics Research Group.
2. Scale model of ion-propelled Ionocraft vertical takeoff lifter flew in 1964
Major Alexander de Seversky developed the design concept for a novel aircraft concept called the “Ionocraft,” which was capable of hovering or moving in any direction at high altitudes by means of ionic discharge. His design for the Ionocraft is described in US Patent 3,130,945, “Ionocraft,” dated 28 April 1964. You can read this patent here: https://patents.google.com/patent/US3130945A/en
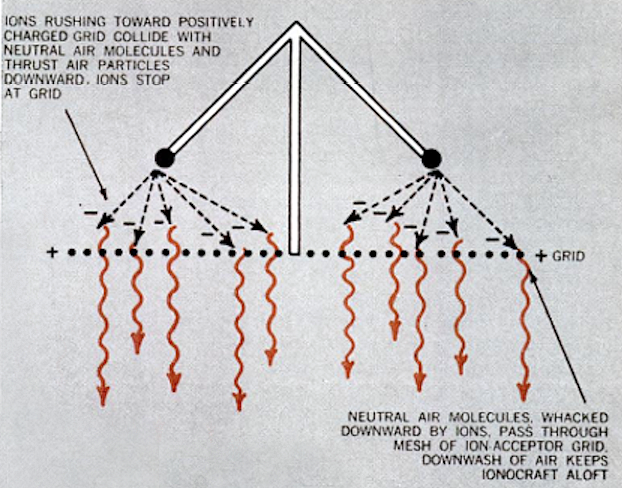
The operating principle of de Seversky’s Ionocraft propulsion system is depicted in the following graphic.
Ion propulsion scheme implemented in the de Seversky Ionocraft. Source: Popular Mechanics, August 1964
In 1964, de Seversky built a two-ounce (57 gram) Ionocraft scale model and demonstrated its ability to fly while powered from an external 90 watt power conversion system (30,000 volts at 3 mA), significantly higher that conventional aircraft and helicopters. This translated into a power-to-weight ratio of about 0.96 hp/pound. You can watch a short 1964 video of a scale model Ionocraft test flight here:
Screenshot showing Ionocraft scale model in flightScreenshot showing ionic wind downdraft under an Ionocraft scale model in flight
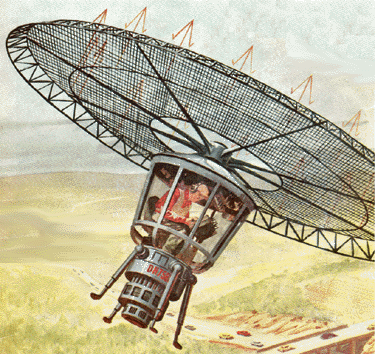
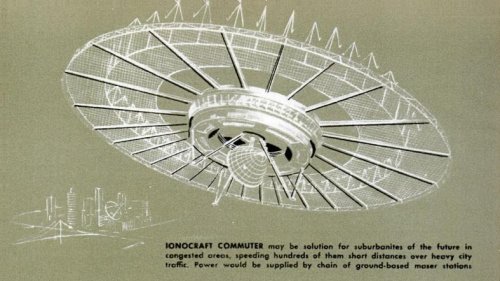
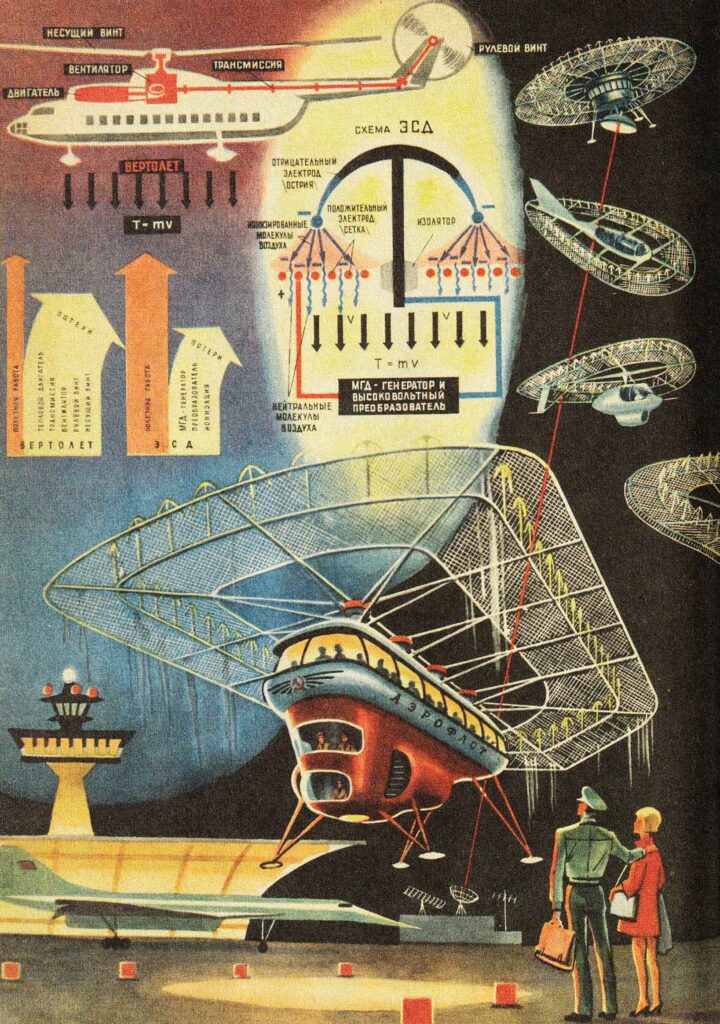
Alexander de Seversky’s one-man Ionocraft concept. Source: Popular Mechanics Archive, August 1964Alexander de Seversky’s Ionocraft commuter concept. Source: Popular Mechanics Archive, August 19641969 Soviet concepts for passenger carrying Ionocraft. Technology for Youth magazine, 1969, Issue 7.
In the 1960s, engineers found that Ionocraft technology did not scale up well and they were unable to build a vehicle that could generate enough lift to carry the equipment needed to produce the electricity needed to drive it.
3. The first free-flying, ion-propelled, lighter-than-air craft flew in 1977: Michael Walden / LTAS XEM-1
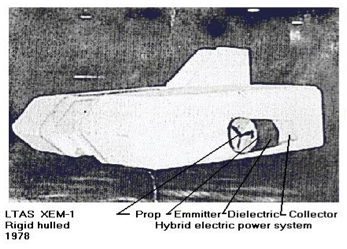
The subscale XEM-1 proof-of-concept demonstrator was designed by Michael Walden and built in 1974 by his firm, Lighter Than Air Solar (LTAS) in Nevada. After leaving LTAS in 2005, Michael Walden founded Walden Aerospace where he is the President and CTO, building on the creative legacy of his work with the former LTAS firms. The Walden Aerospace website is here: http://walden-aerospace.com/HOME.html
The basic configuration of this small airship is shown in the following photo. The MK-1 ionic airflow (IAF) hybrid EK drives are mounted on the sides of the airship’s rigid hull.
Source: Walden Aerospace.
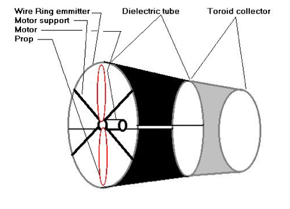
Basic configuration of the MK-1 ionic airflow (IAF) hybrid EK drive. Source: Walden Aerospace.
XEM-1 originally was tethered by cable to an external control unit and later was modified for wireless remote control operation. In this latter configuration, XEM-1 demonstrated the use of a hybrid EK propulsion system in a self-powered, free-flying vehicle.
Walden described the MK-1 IAF EK drive as follows: “The duct included a 10 inch ‘bent tip’ 3-bladed prop running on an electric motor to create higher pressures through the duct, making it a ‘modified pressure lifter’…. The duct also had a circular wire emitter, a dielectric separator and a toroidal collector making it a ‘toroid lifter’.”
The later MK-2 and MK-3 IAF EK drives had a similar duct configuration. In all of these EK drives, the flow of ions from emitter to collector imparts momentum to neutral air molecules, creating usable thrust for propulsion. You’ll find more information on the MK-1 IAF EK drive and later versions on the Walden Aerospace website here: http://walden-aerospace.com/Waldens_Patents_files/Walden%20Aerospace%20Advanced%20Technologies%2011092013-2.pdf
The XEM-1 was demonstrated to the Department of Defense (DoD) and Department of Energy (DOE) in 1977 at Nellis Air Force Base in Nevada. Walden reported: “We flew the first fully solar powered rigid airship in 1974, followed by a US Department of Defense and Department of Energy flight demonstration in August 1977”…. “ DoD was interested in this work to the extent that some of it is still classified despite requests for the information to become freely available.”
Walden credits the XEM-1 with being the first fully self-contained air vehicle to fly with a hybrid ionic airflow electro-kinetic propulsion system. This small airship also demonstrated the feasibility of a rigid, composite, monocoque aeroshell, which became a common feature on many later Walden / LTAS airships.
4. The second free-flying, ion-propelled, lighter-than-air craft flew in 2003: Michael Walden / LTAS EK-1
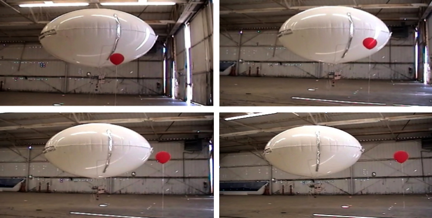
Michael Walden designed the next-generation EK-1, which was a remotely controlled, self-powered, subscale model of a lenticular airship with a skin-integrated EK drive that was part of the outer surface of the hull. The drive was electronically steered to provide propulsion in any direction with no external aerodynamic surfaces and no moving parts.
EK-1 aloft in the hanger. Source: LTAS / Walden Aerospace
EK-1 with a skin-integrated propulsion system moving during hanger test flight in 2003.Source: LTAS / Walden Aerospace
In June 2003, LTAS rented a hangar at the Boulder City, NV airport to build and fly the EK-1. Testing the EK-1 was concluded in early August 2003 after demonstrating the technology to National Institute for Discovery Science (NIDS) board members.
Based on the EK-1 design, a full-scale EK airship would have a rigid, aeroshell comprised largely of LTAS MK-4 lithographic integrated thruster / structure hull panels. As with other contemporary Walden / LTAS airship designs, the MK-4 panel airship likely would have implemented density controlled buoyancy (DCB) active aerostatic lift control and would have had a thin film solar array on the top of the aeroshell.
Artist’s concept of a MK-4 panel airship. Source: Walden Aerospace
5. The third free-flying, ion-propelled, lighter-than-air craft flew in 2005: the Festo b-IONIC Airfish
The Festo b-IONIC Airfish airship was developed at the Technical University of Berlinwith guidance of the firm Festo AG & Co. KG. This small, non-rigid airship is notable because, in 2005, it became the first aircraft to fly with a solid state propulsion system. The neutrally-buoyant Airfish only flew indoors, in a controlled environment, at a very slow speed, but it flew.
Airfish. Source: Festo AG & Co. KG
Some of the technical characteristics of the Airfish are listed below:
Length: 7.5 meters (24.6 ft)
Span: 3.0 meters (9.8 ft)
Shell diameter: 1.83 meters (6 ft)
Helium volume: 9.0 m3(318 ft3)
Total weight: 9.04 kg (19.9 lb)
Power source in tail: 12 x 1,500 mAh lithium-ion polymer cells (18 Ah total)
Power source per wing (two wings): 9 x 3,200 mAh lithium-ion polymer cells (28.8 Ah total)
High voltage: 20,000 to 30,000 volts
Buoyancy: 9.0 – 9.3 kg (19.8 – 20.5 lb)
Total thrust: 8 – 10 grams (0.018 – 0.022 pounds)
Maximum velocity: 0.7 meters/sec (2.5 kph; 1.6 mph)
The b-IONIC Airfish employed two solid state propulsion systems, an electrostatic ionic jet and a plasma ray, which Festo describes as follows:
Electrostatic ionic jet: “At the tail end Airfish uses the classic principle of an electrostatic ionic jet propulsion engine. High-voltage DC-fields (20-30 kV) along thin copper wires tear electrons away from air molecules. The positive ions thus created are then accelerated towards the negatively charged counter electrodes (ring-shaped aluminum foils) at high speeds (300-400 m/s), pulling along additional neutral air molecules. This creates an effective ion stream with speeds of up to 10 m/s.”
Plasma-ray: “The side wings of Airfish are equipped with a new bionic plasma-ray propulsion system, which mimics the wing based stroke principle used by birds, such as penguins, without actually applying movable mechanical parts. As is the case with the natural role model, the plasma-ray system accelerates air in a wavelike pattern while it is moving across the wings.”
Airfish. Source: Festo AG & Co. KG
Airfish. Source: Festo AG & Co
The Festo b-IONIC Airfish demonstrated that a solid state propulsion system was possible. The tests also demonstrated that the solid state propulsion systems also reduced drag, raising the intriguing possibility that it may be possible to significantly reduce drag if an entire vessel could be enclosed in a ionized plasma bubble.You’ll find more information on the Festo b-IONIC Airfish, its solid state propulsion system and implications for drag reduction in the the Festo brochure here: https://www.festo.com/net/SupportPortal/Files/344798/b_IONIC_Airfish_en.pdf
You can watch a 2005 short video on the Festo b-IONIC Airfish flight here:
6. NASA ionic wind study – 2009
A corona discharge device generates an ionic wind, and thrust, when a high voltage corona discharge is struck between sharply pointed electrodes and larger radius ground electrodes.
In 2009, National Aeronautics & Space Administration (NASA) researchers Jack Wilson, Hugh Perkins and William Thompson conducted a study to examine whether the thrust of corona discharge systems could be scaled to values of interest for aircraft propulsion. Their results are reported in report NASA/TM-2009-215822, which you’ll find at the following link: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20100000021.pdf
Key points of the study included:
Different types of high voltage electrodes were tried, including wires, knife-edges, and arrays of pins. A pin array was found to be optimum.
Parametric experiments, and theory, showed that the thrust per unit power could be raised from early values of 5 N/kW to values approaching 50 N/kW, but only by lowering the thrust produced, and raising the voltage applied.
In addition to using DC voltage, pulsed excitation, with and without a DC bias, was examined. The results were inconclusive as to whether this was advantageous.
It was concluded that the use of a corona discharge for aircraft propulsion did not seem very practical.”
7. The first heavier-than-air, fixed-wing, ion-propelled aircraft flew in 2018
On 21 November 2018, MIT researchers reported successfully flying the world’s first heavier-than-air, fixed-wing, ion-propelled (electroaerodynamic, EAD) aircraft. You can read the paper by Haofeng Xu, et al., “Flight of an aeroplane with solid-state propulsion,” on the Nature website here: https://www.nature.com/articles/s41586-018-0707-9
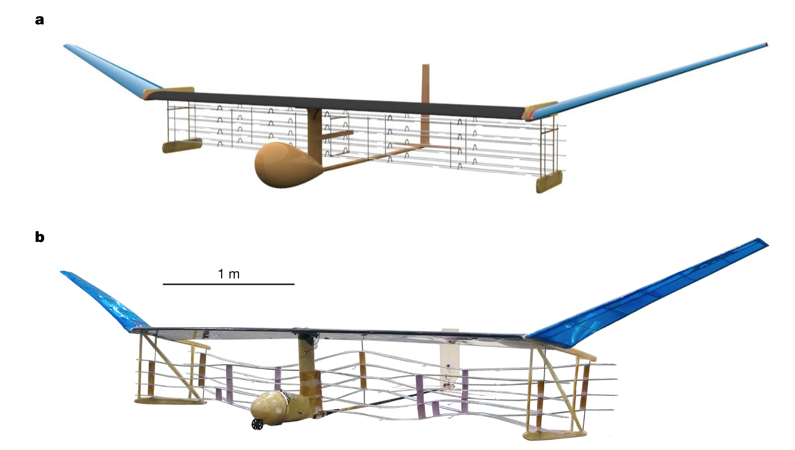
The design of the MIT EAD aircraft is shown below:
a, Computer-generated rendering of the EAD airplane. b, Photograph of actual EAD airplane (after multiple flight trials).
Some of the technical characteristics of this MIT aircraft are listed below:
Wingspan: 4.9 meters (16 ft)
Total weight: 2.45 kg (5.4 lb)
Power source: powered by 54 x 3.7 volt 150 mAh lithium-ion polymer cells (8.1 Ah total)
Maximum velocity: 4.8 meters/sec (17.3 kph; 10.7 mph)
In their paper, the MIT researchers reported:
“We performed ten flights with the full-scale experimental aircraft at the MIT Johnson Indoor Track…. Owing to the limited length of the indoor space (60 m), we used a bungeed launch system to accelerate the aircraft from stationary to a steady flight velocity of 5 meters/sec within 5 meters, and performed free flight in the remaining 55 meters of flight space. We also performed ten unpowered glides with the thrusters turned off, in which the airplane flew for less than 10 meters. We used cameras and a computer vision algorithm to track the aircraft position and determine the flight trajectory.”
“All flights gained height over the 8–9 second segment of steady flight, which covered a distance of 40–45 meters…. The average physical height gain of all flights was 0.47 meters…. However, for some of the flights, the aircraft velocity decreased during the flight. An adjustment for this loss of kinetic energy…. results in an energy equivalent height gain, which is the height gain that would have been achieved had the velocity remained constant. This was positive for seven of the ten flights, showing that better than steady-level flight had been achieved in those cases.”
“In this proof of concept for this method of propulsion, the realized thrust-to-power ratio was 5 N/kW1, which is of the order of conventional airplane propulsion methods such as the jet engine.” Overall efficiency was estimated to be 2.56%.
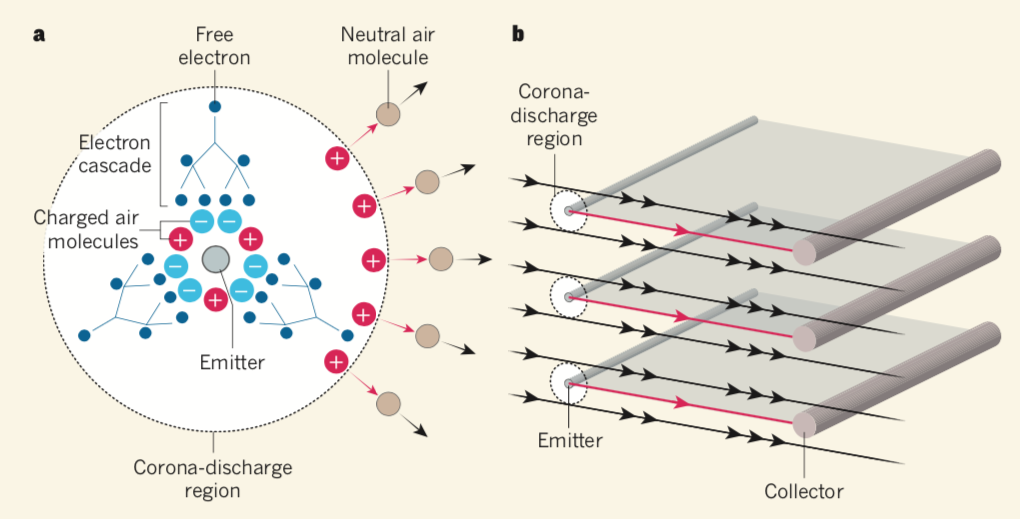
The propulsion principles of the MIT EAD aircraft are explained in relation to the following diagram in the November 2018 article by Franck Plouraboué, “Flying With Ionic Wind,” which you can read on the Nature website at the following link: https://www.nature.com/articles/d41586-018-07411-z
The following diagram and explanatory text are reproduced from that article.
In Figure a, above: …an electric field (not shown) is applied to the region surrounding a fine wire called the emitter (shown in cross-section). The field induces electron cascades, whereby free electrons collide with air molecules (not shown in the cascades) and consequently free up more electrons. This process produces charged air molecules in the vicinity of the emitter — a corona discharge. Depending on the electric field, negatively or positively charged molecules drift away (red arrows) from the emitter. These molecules collide with neutral air molecules, generating an ionic wind (black arrows).
In Figure b, above: The aircraft uses a series of emitters and devices called collectors, the longitudinal directions of which are perpendicular to the ionic wind. The flow of charged air molecules occurs mainly along the directions (red arrows) joining emitters and collectors. Consequently, the ionic wind is accelerated (black arrows) predominantly in these regions.
You can view a short video of the MIT EAD aircraft test flights here:
8. The future of ionic propulsion for aerospace applications.
If it can be successfully developed to much larger scales, ionic propulsion offers the potential for aircraft to fly in the atmosphere on a variety of practical missions using only ionized air for propulsion. Using other ionized fluid media, ionic propulsion could develop into a means to fly directly from the surface of the earth into the vacuum of space and then operate in that environment. The following organizations have been developing such systems.
Electrofluidsystems Ltd.
In 2006, the Technical University of Berlin’s Airfish project manager, Berkant Göksel, founded the firm Electrofluidsystems Ltd., which in 2012 was rebranded as IB Göksel Electrofluidsystems. This firm presently is developing a new third generation of plasma-driven airships with highly reduced ozone and nitrogen oxide (NOx) emissions, magneto-plasma actuators for plasma flow control, and the company’s own blended wing type flying wing products. You’ll find their website here: https://www.electrofluidsystems.com
Source: Electrofluidsystems TU BerlinAdvanced plasma-driven aircraft concept. Source: Electrofluidsystems TU Berlin
MIT researchers are developing designs for high-performance aircraft using ionic propulsion. Theoretically, efficiency improves with speed, with an efficiency of 50% possible at a speed of about 1,000 kph (621 mph). You can watch a short video on MIT work to develop a Star Trek-like ion drive aircraft here:
Electron Air LLC
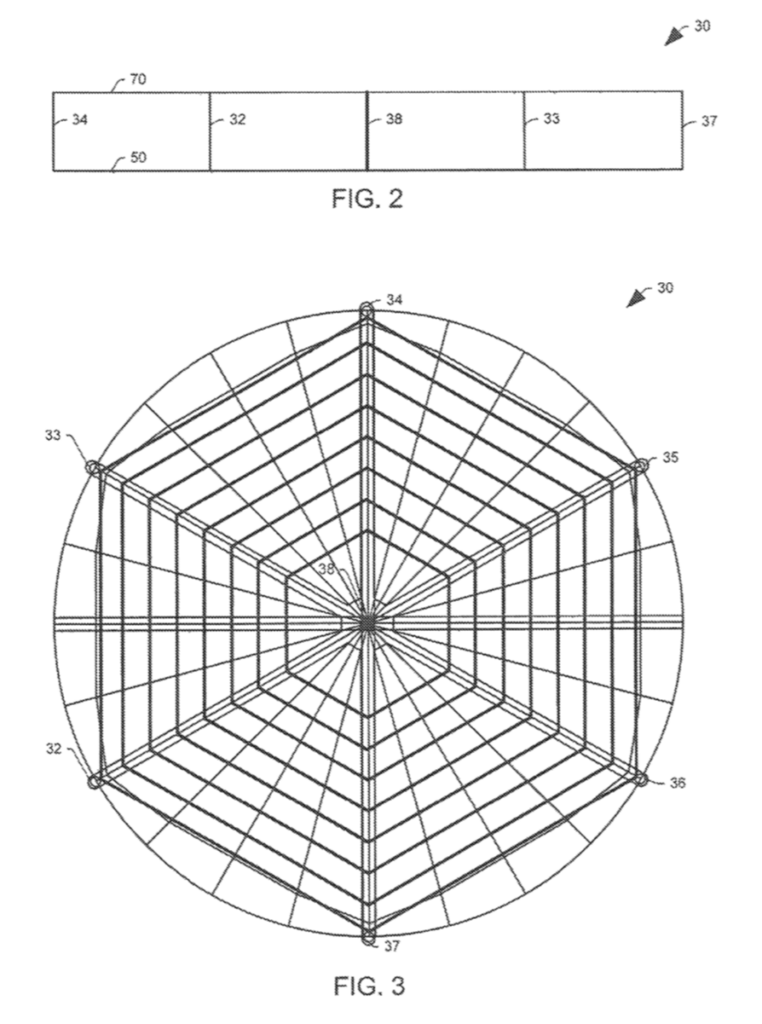
Another firm active in the field of ionic propulsion is Electron Air LLC (https://electronairllc.org), which, on 6 November 2018, was granted patent US10119527B2 for their design for a self-contained ion powered craft. Their grid shaped craft is described as follows:
“The aircraft assembly includes a collector assembly, an emitter assembly, and a control circuit operatively connected to at least the emitter and collector assemblies and comprising a power supply configured to provide voltage to the emitter and collector assemblies. The assembly is configured, such that, when the voltage is provided from an on board power supply, the aircraft provides sufficient thrust to lift each of the collector assembly, the emitter assembly, and the entire power supply against gravity.”
The device, as shown in patent Figure 3, consists of a two-layer grid structure with a collector assembly (50), an emitter assembly (70) and peripheral supports (33 to 37).
This patent cites Alexander de Seversky’s Patent 3130945, “Ionocraft.”
You can watch a short (1:22 minute) video of an outdoor tethered test flight of a remotely controlled, self-contained, ion powered, heavier-than-air craft with onboard power at the following link: https://www.youtube.com/watch?v=aX21HCHlgKo
University of Florida, Applied Physics Research Group
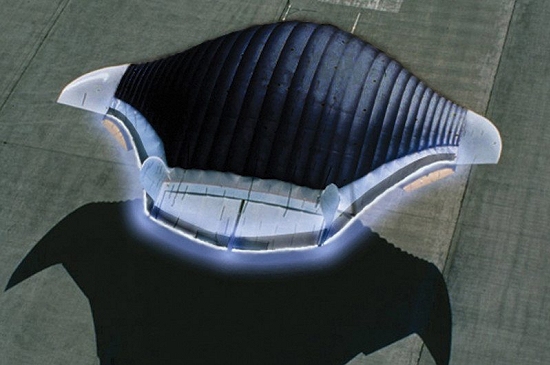
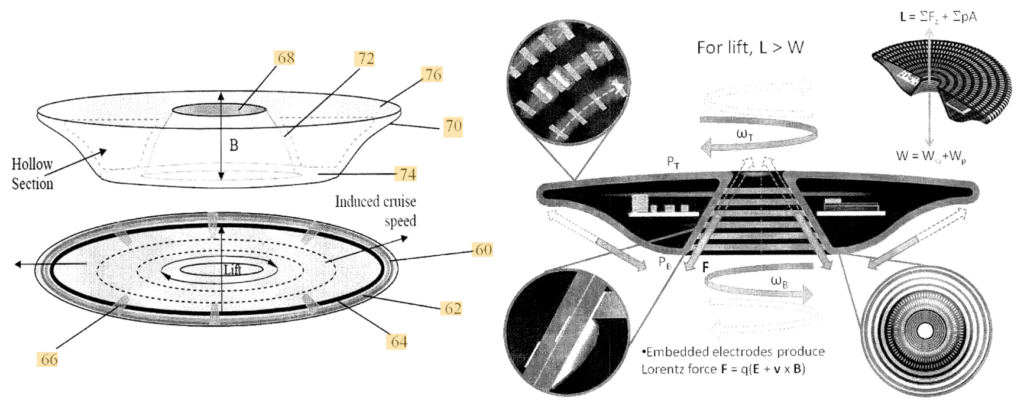
In the early 2000s, a Wingless Electromagnetic Air Vehicle (WEAV) was invented by Dr. Subrata Roy, a plasma physicist and aerospace engineering professor at the University of Florida. WEAV is described as a heavier-than-air flight system that can self-lift, hover, and fly using plasma propulsion with no moving components. The laboratory-scale device is six inch (15.2 cm) in diameter. The basic configuration of the disc-shaped craft is shown in patent 8960595B2 Figure 1.
This research project has been supported by the US Air Force Office of Scientific Research. You’ll find details on WEAV technology in the University of Florida’s 2011 final report at the following (very slow loading) link:https://apps.dtic.mil/dtic/tr/fulltext/u2/a564120.pdf
In this report, the authors describe the technology: “This revolutionary concept is based on the use of an electro-(or magneto) hydrodynamic (EHD/MHD) thrust generation surface that is coated with multiple layers of dielectric polymers with exposed and/or embedded electrodes for propulsion and dynamic control. This technology has the unique capability of imparting an accurate amount of thrust into the surrounding fluid enabling the vehicle to move and react. Thrust is instantaneously and accurately controlled by the applied power, its waveform, duty cycle, phase lag and other electrical parameters. Once the applied power is removed the thrust vanishes.”
The following patents related to WEAV technology have been filed and assigned to the University of Florida Research Foundation Inc.:
M. Robinson, “Movement of Air in the Electric Wind of the Corona Discharge:, Technical Paper TP60-2, Research-Cottrell, Inc., Bound Brook, NJ, 8 June 1960; https://apps.dtic.mil/dtic/tr/fulltext/u2/262830.pdf
P. Zheng, et al., “A Comprehensive Review of Atmospheric-Breathing Electric Propulsion Systems,” International Journal of Aerospace Engineering, Article ID 8811847, 7 October 2020; https://www.hindawi.com/journals/ijae/2020/8811847/
Nicolas Monrolin, Franck Plouraboué, Olivier Praud.“Electrohydrodynamic Thrust for In-Atmosphere Propulsion,” AIAA Journal, American Institute of Aeronautics and Astronautics, 2017, vol. 55 (n° 12), pp. 4296-4305. 10.2514/1.J055928 . hal-01660600; https://hal.archives-ouvertes.fr/hal-01660600/document
Daniel Drew, “The Ionocraft: Flying Microrobots With No Moving Parts,” Technical Report No. UCB/EECS-2018-164, Electrical Engineering and Computer Sciences, University of California at Berkeley, 10 December 2018; https://www2.eecs.berkeley.edu/Pubs/TechRpts/2018/EECS-2018-164.pdf
WEAV
Subrata Roy, et al., “Demonstration of a Wingless Electromagnetic Air Vehicle,” Final Report AFRL-OSR-VA-TR-2012-0922, University of Florida, Applied Physics Research Group: https://apps.dtic.mil/dtic/tr/fulltext/u2/a564120.pdf
1. Overview of US military optical reconnaissance satellite programs
The National Reconnaissance Office (NRO) is responsible for developing and operating space reconnaissance systems and conducting intelligence-related activities for US national security. NRO developed several generations of classified Keyhole (KH) military optical reconnaissance satellites that have been the primary sources of Earth imagery for the US Department of Defense (DoD) and intelligence agencies. NRO’s website is here:
NRO’s early generations of Keyhole satellites were placed in low Earth orbits, acquired the desired photographic images on film during relatively short-duration missions, and then returned the film to Earth in small reentry capsules for airborne recovery. After recovery, the film was processed and analyzed. The first US military optical reconnaissance satellite program, code named CORONA, pioneered the development and refinement of the technologies, equipment and systems needed to deploy an operational orbital optical reconnaissance capability. The first successful CORONA film recovery occurred on 19 August 1960.
Specially modified US Air Force C-119J aircraft recovers a CORONA film canister in flight. Source: US Air Force
First reconnaissance picture taken in orbit and successfully recovered on Earth; taken on 18 August 1960 by a CORONA KH-1 satellite dubbed Discoverer 14. Image shows the Mys Shmidta airfield in the Chukotka region of the Russian Arctic, with a resolution of about 40 feet (12.2 meters). Source: Wikipedia
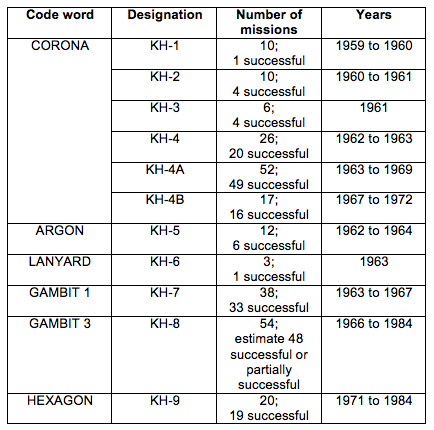
Keyhole satellites are identified by a code word and a “KH” designator, as summarized in the following table.
In 1976, NRO deployed its first electronic imaging optical reconnaissance satellite known as KENNEN KH-11 (renamed CRYSTAL in 1982), which eventually replaced the KH-9, and brought an end to reconnaissance satellite missions requiring film return. The KH-11 flies long-duration missions and returns its digital images in near real time to ground stations for processing and analysis. The KH-11, or an advanced version sometimes referred to as the KH-12, is operational today.
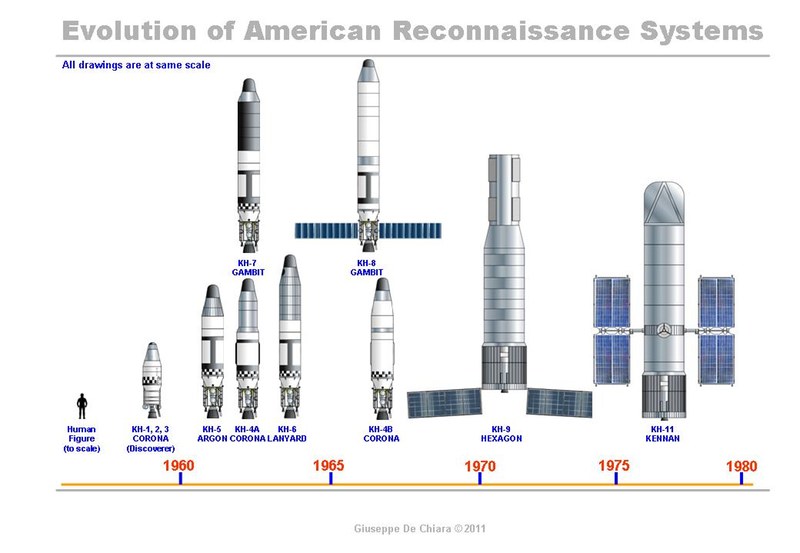
US film-return reconnaissance satellites from KH-1 to KH-9 shown to scale with the KH-11 electronic imaging reconaissance satellite. Credit: Giuseppe De Chiara and The Space Review.
Geospatial intelligence, or GEOINT, is the exploitation and analysis of imagery and geospatial information to describe, assess and visually depict physical features and geographically referenced activities on the Earth. GEOINT consists of imagery, imagery intelligence and geospatial information. Satellite imagery from Keyhole reconnaissance satellites is an important information source for national security-related GEOINT activities.
The National Geospatial-Intelligence Agency (NGA), which was formed in 2003, has the primary mission of collecting, analyzing, and distributing GEOINT in support of national security. NGA’s predecessor agencies, with comparable missions, were:
National Imagery and Mapping Agency (NIMA), 1996 – 2003
National Photographic Interpretation Center (NPIC), a joint project of the Central Intelligence Agency (CIA) and DoD, 1961 – 1996
2. The advent of the US civilian Earth observation programs
Collecting Earth imagery from orbit became an operational US military capability more than a decade before the start of the joint National Aeronautics & Space Administration (NASA) / US Geological Survey (USGS) civilian Landsat Earth observation program. The first Landsat satellite was launched on 23 July 1972 with two electronic observing systems, both of which had a spatial resolution of about 80 meters (262 feet).
Since 1972, Landsat satellites have continuously acquired low-to-moderate resolution digital images of the Earth’s land surface, providing long-term data about the status of natural resources and the environment. Resolution of the current generation multi-spectral scanner on Landsat 9 is 30 meters (98 feet) in visible light bands.
3. Declassification of certain military reconnaissance satellite imagery
All military reconnaissance satellite imagery was highly classified until 1995, when some imagery from early defense reconnaissance satellite programs was declassified. The USGS explains:
“The images were originally used for reconnaissance and to produce maps for U.S. intelligence agencies. In 1992, an Environmental Task Force evaluated the application of early satellite data for environmental studies. Since the CORONA, ARGON, and LANYARD data were no longer critical to national security and could be of historical value for global change research, the images were declassified by Executive Order 12951 in 1995”
Additional sets of military reconnaissance satellite imagery were declassified in 2002 and 2011 based on extensions of Executive Order 12951.
The declassified imagery is held by the following two organizations:
The original film is held by the National Archives and Records Administration (NARA).
Duplicate film held in the USGS Earth Resources Observation and Science (EROS) Center archive is used to produce digital copies of the imagery for distribution to users.
The declassified military satellite imagery available in the EROS archive is summarized below:
USGS EROS Archive – Declassified Satellite Imagery – 1 (1960 to 1972)
This set of photos, declassified in 1995, consists of more than 860,000 images of the Earth’s surface from the CORONA, ARGON, and LANYARD satellite systems.
CORONA image resolution improved from 40 feet (12.2 meters) for the KH-1 to about 6 feet (1.8 meters) for the KH-4B.
KH-5 ARGON image resolution was about 460 feet (140 meters).
KH-6 LANYARD image resolution was about 6 feet (1.8 meters).
USGS EROS Archive – Declassified Satellite Imagery – 2 (1963 to 1980)
This set of photos, declassified in 2002, consists of photographs from the KH-7 GAMBIT surveillance system and KH-9 HEXAGON mapping program.
KH-7 image resolution is 2 to 4 feet (0.6 to 1.2 meters). About 18,000 black-and-white images and 230 color images are available.
The KH-9 mapping camera was designed to support mapping requirements and exact positioning of geographical points. Not all KH-9 satellite missions included a mapping camera. Image resolution is 20 to 30 feet (6 to 9 meters); significantly better than the 98 feet (30 meter) resolution of LANDSAT imagery. About 29,000 mapping images are available.
USGS EROS Archive – Declassified Satellite Imagery – 3 (1971 to 1984)
This set of photos, declassified in 2011, consists of more photographs from the KH-9 HEXAGON mapping program. Image resolution is 20 to 30 feet (6 to 9 meters).
4. Example applications of declassified military reconnaissance satellite imagery
The declassified military reconnaissance satellite imagery provides views of the Earth starting in the early 1960s, more than a decade before civilian Earth observation satellites became operational. The military reconnaissance satellite imagery, except from ARGON KH-5, is higher resolution than is available today from Landsat civilian earth observation satellites. The declassified imagery is an important supplement to other Earth imagery sources. Several examples applications of the declassified imagery are described below.
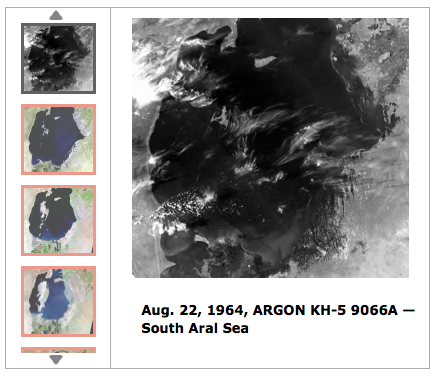
4.1 Assessing Aral Sea depletion
USGS reports: “The Aral Sea once covered about 68,000 square kilometers, a little bigger than the U.S. state of West Virginia. It was the 4th largest lake in the world. It is now only about 10% of the size it was in 1960…..In the 1990s, a dam was built to prevent North Aral water from flowing into the South Aral. It was rebuilt in 2005 and named the Kok-Aral Dam…..The North Aral has stabilized but the South Aral has continued to shrink and become saltier. Up until the 1960s, Aral Sea salinity was around 10 grams per liter, less than one-third the salinity of the ocean. The salinity level now exceeds 100 grams per liter in the South Aral, which is about three times saltier than the ocean.”
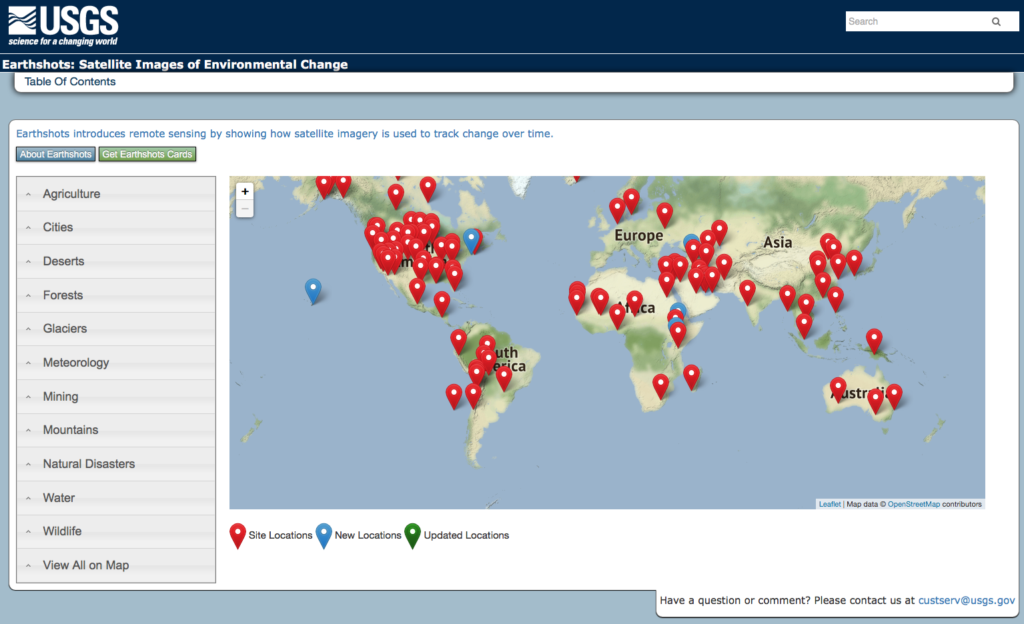
On the USGS website, the “Earthshots: Satellite Images of Environmental Change” webpages show the visible changes at many locations on Earth over a 50+ year time period. The table of contents to the Earthshots webpages is shown below and is at the following link: http:// https://earthshots.usgs.gov/earthshots/
USGS Earthshots Table of Contents
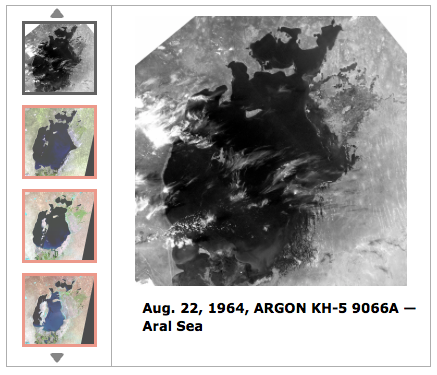
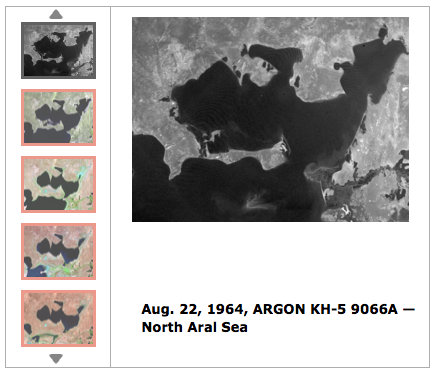
For the Aral Sea region, the Earthshots photo sequences start with ARGON KH-5 photos taken in 1964. Below are three screenshots of the USGS Earthshots pages showing the KH-5 images for the whole the Aral Sea, the North Aral Sea region and the South Aral Sea region. You can explore the Aral Sea Earthshots photo sequences at the following link: https://earthshots.usgs.gov/earthshots/node/91#ad-image-0-0
4.2 Assessing Antarctic ice shelf condition
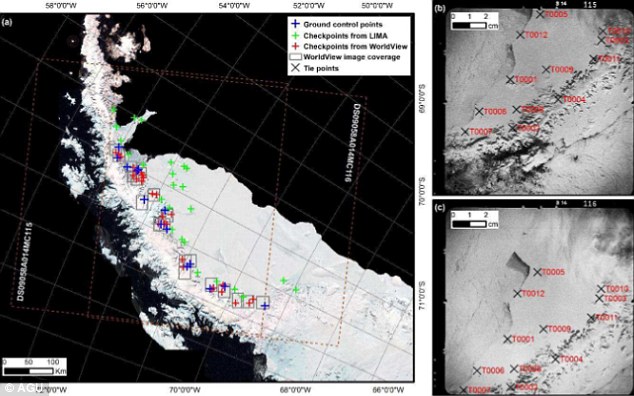
In a 7 June 2016 article entitled, ”Spy satellites reveal early start to Antarctic ice shelf collapse,” Thomas Sumner reported:
“Analyzing declassified images from spy satellites, researchers discovered that the downhill flow of ice on Antarctica’s Larsen B ice shelf was already accelerating as early as the 1960s and ’70s. By the late 1980s, the average ice velocity at the front of the shelf was around 20 percent faster than in the preceding decades,….”
Satellite images taken by the ARGON KH-5 satellite have revealed how the accelerated movement that triggered the collapse of the Larsen B ice shelf on the east side of the Antarctic Peninsula began in the 1960s. The declassified images taken by the satellite on 29 August 1963 and 1 September 1963 are pictured right. Source: Daily Mail, 10 June 2016
4.3 Assessing Himalayan glacier condition
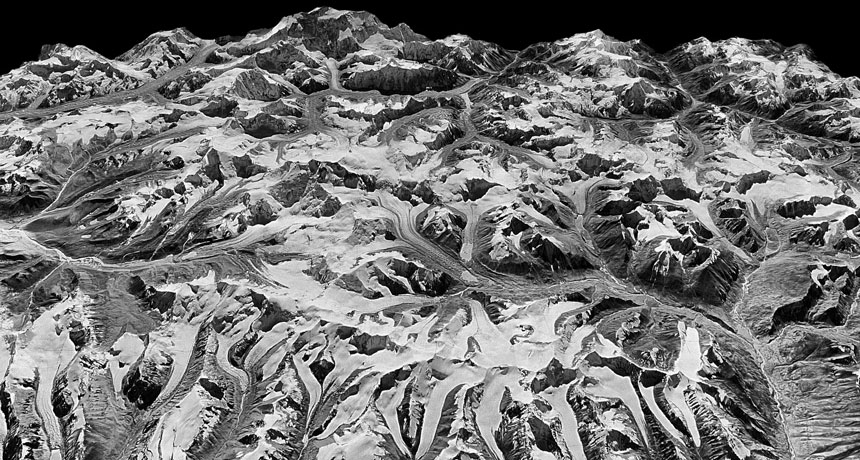
In a 19 June 2019 paper “Acceleration of ice loss across the Himalayas over the past 40 years,” the authors, reported on the use of HEXAGON KH-9 mapping camera imagery to improve their understanding of trends affecting the Himalayan glaciers from 1975 to 2016:
“Himalayan glaciers supply meltwater to densely populated catchments in South Asia, and regional observations of glacier change over multiple decades are needed to understand climate drivers and assess resulting impacts on glacier-fed rivers. Here, we quantify changes in ice thickness during the intervals 1975–2000 and 2000–2016 across the Himalayas, using a set of digital elevation models derived from cold war–era spy satellite film and modern stereo satellite imagery.”
“The majority of the KH-9 images here were acquired within a 3-year interval (1973–1976), and we processed a total of 42 images to provide sufficient spatial coverage.”
“We observe consistent ice loss along the entire 2000-km transect for both intervals and find a doubling of the average loss rate during 2000–2016.”
“Our compilation includes glaciers comprising approximately 34% of the total glacierized area in the region, which represents roughly 55% of the total ice volume based on recent ice thickness estimates.”
3-D image of the Himalayas derived from HEXAGON KH-9 satellite mapping photographs taken on December 20, 1975.Source: J. M. Maurer/LDEO
4.4 Discovering archaeological sites
A. CORONA Atlas Project
The Center for Advanced Spatial Technologies, a University of Arkansas / U.S. Geological Survey collaboration, has undertaken the CORONA Atlas Project using military reconnaissance satellite imagery to create the “CORONA Atlas & Referencing System”. The current Atlas focuses on the Middle East and a small area of Peru, and is derived from 1,024 CORONA images taken on 50 missions. The Atlas contains 833 archaeological sites.
“In regions like the Middle East, CORONA imagery is particularly important for archaeology because urban development, agricultural intensification, and reservoir construction over the past several decades have obscured or destroyed countless archaeological sites and other ancient features such as roads and canals. These sites are often clearly visible on CORONA imagery, enabling researchers to map sites that have been lost and to discover many that have never before been documented. However, the unique imaging geometry of the CORONA satellite cameras, which produced long, narrow film strips, makes correcting spatial distortions in the images very challenging and has therefore limited their use by researchers.”
Screenshot of the CORONA Atlas showing regions in the Middle East with data available.
CAST reports that they have “developed methods for efficient
orthorectification of CORONA imagery and now provides free public access to our imagery database for non-commercial use. Images can be viewed online and full resolution images can be downloaded in NITF format.”
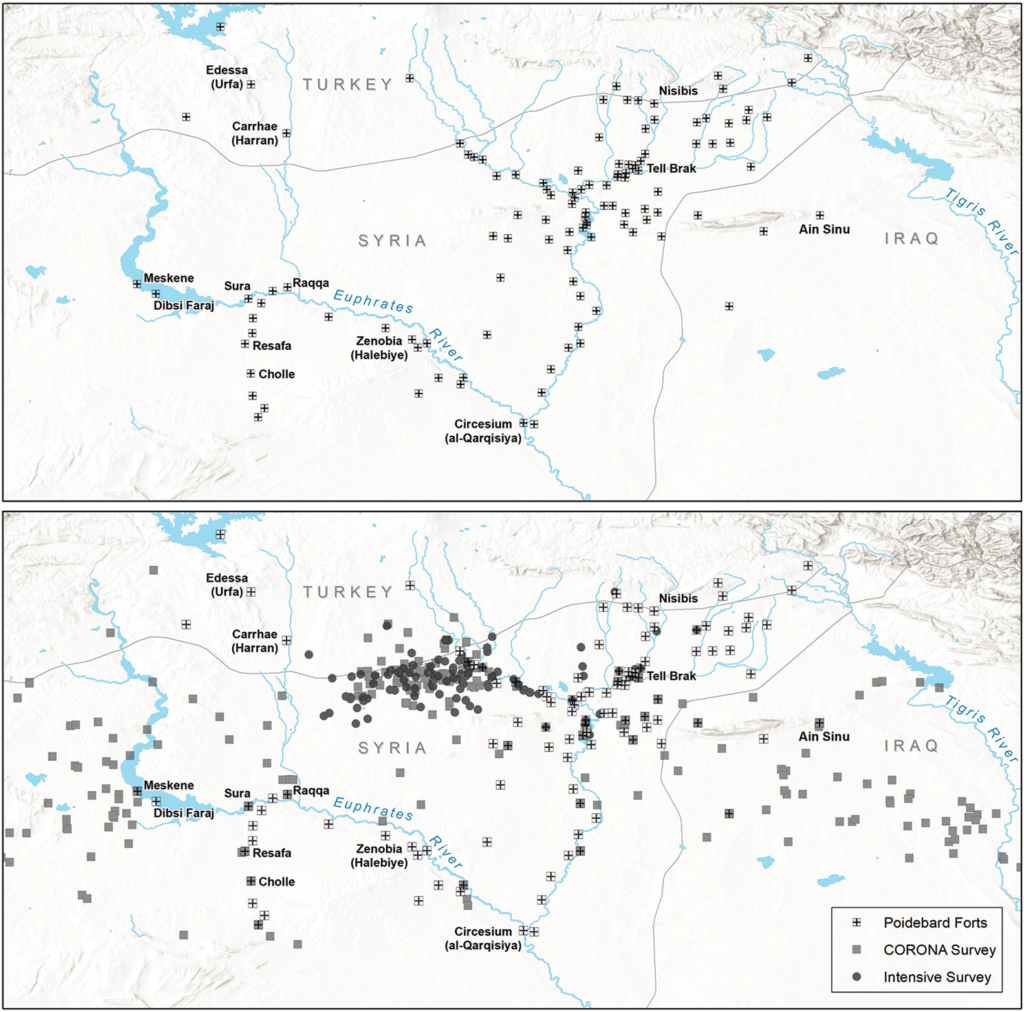
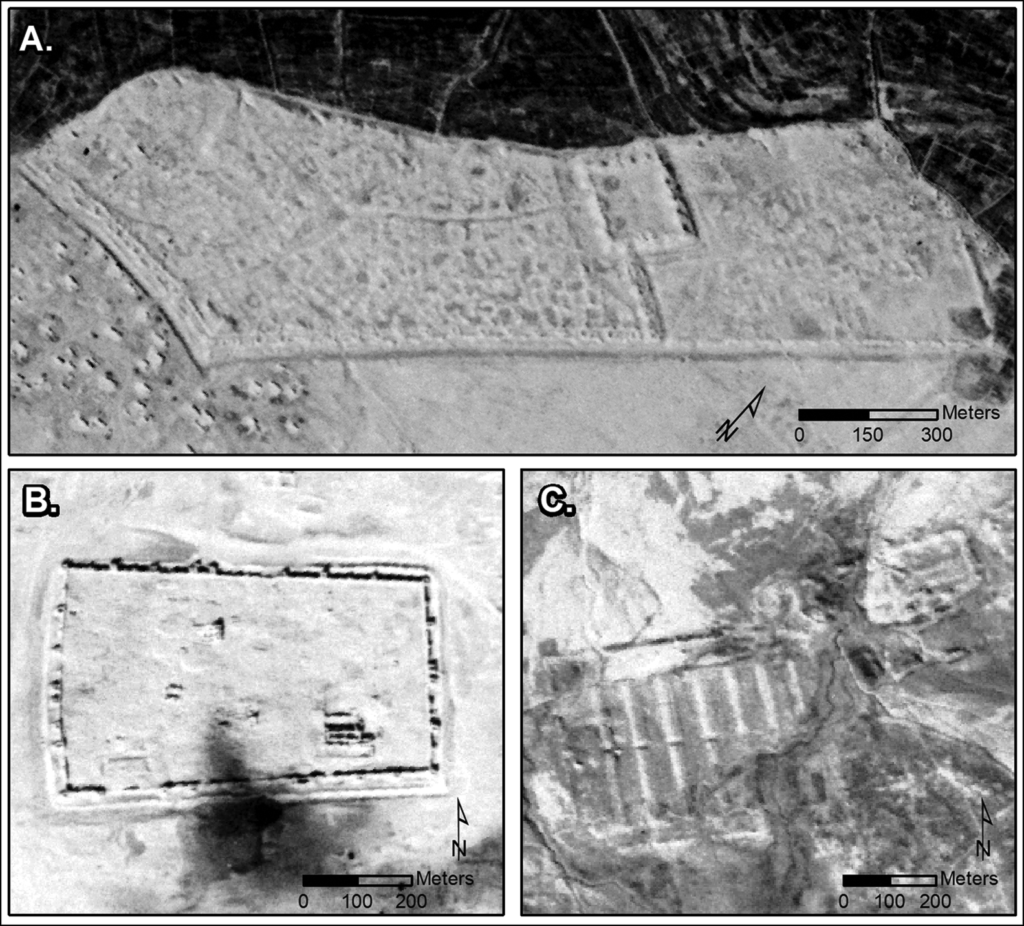
In October 2023, a team from Dartmouth College published a paper that described their recent discovery of 396 Roman-era forts using declassified CORONA and HEXAGON spy satellite imagery of regions of Syria, Iraq and nearby “fertile crescent” territories of the eastern Mediterranean. The study area is shown in the following map. A previous aerial survey of the area in 1934 had identified 116 other forts in the same region.
Dartmouth study area. Source: J. Casana, et al. (26 October 2023)
The authors noted, “Perhaps the most significant realization from our work concerns the spatial distribution of the forts across the landscape, as this has major implications for our understanding of their intended purpose as well as for the administration of the eastern Roman frontier more generally.”
Comparison of the distribution of forts documented in the 1934 aerial survey (top)and forts found recently on declassified satellite imagery (bottom).Source: Figure 9, J. Casana, et al. (26 October 2023)
Examples of the new forts identified by the Dartmouth team in satellite imagery are shown in the following figures.
CORONA images showing three major sites: (A) Sura (NASA1401); (B) Resafa (NASA1398); and (C) Ain Sinu (CRN999).Source: Figure 3, J. Casana, et al. (26 October 2023)
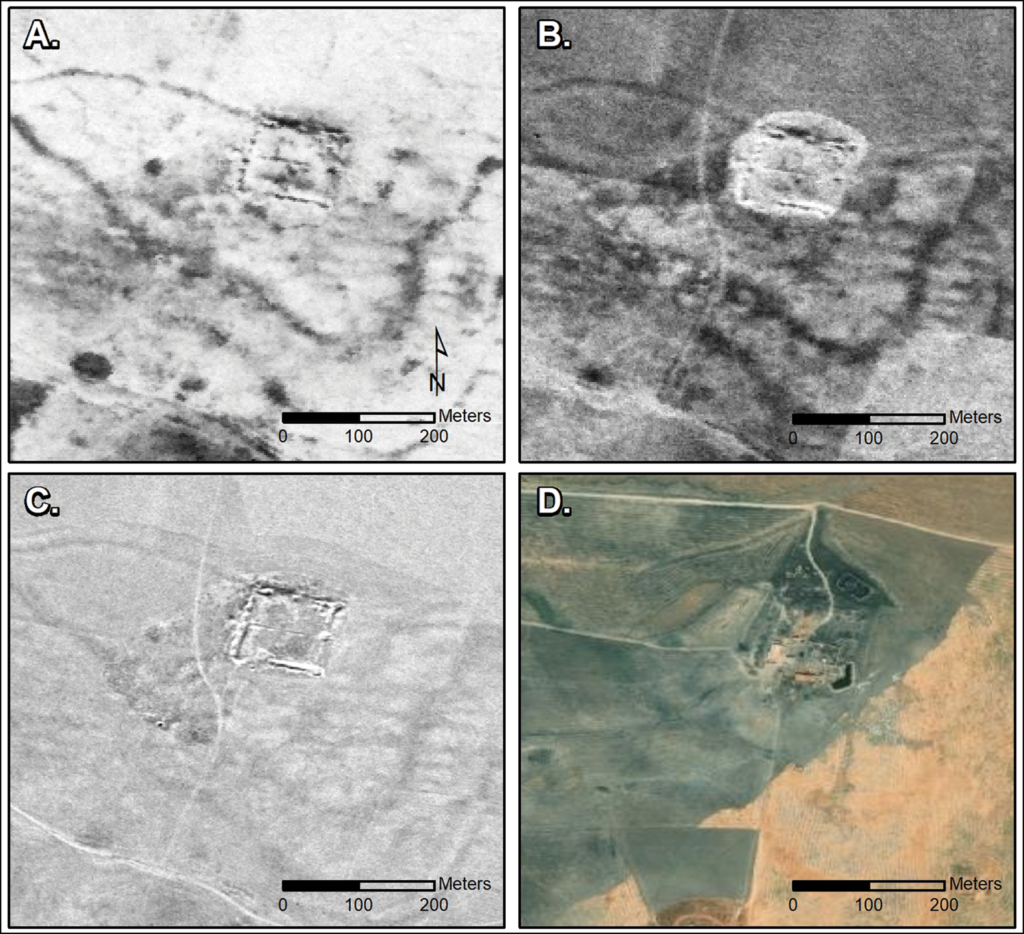
Castellum at Tell Brak site in multiple images: (A) CORONA (1102, 17 December 1967); (B) CORONA (1105, 4 November 1968); (C) HEXAGON (1204, 17 November 1974); and (D) modern satellite imagery. Source: Figure 4, J. Casana, et al. (26 October 2023)
The teams paper concludes: “Finally, the discovery of such a large number of previously undocumented ancient forts in this well-studied region of the Near East is a testament to the power of remote-sensing technologies as transformative tools in contemporary archaeological research.”
4.5 Conducting commercial geospatial analytics over a broader period of time
The firm Orbital Insight, founded in 2013, is an example of commercial firms that are mining geospatial data and developing valuable information products for a wide range of customers. Orbital Insight reports:
“Orbital Insight turns millions of images into a big-picture understanding of Earth. Not only does this create unprecedented transparency, but it also empowers business and policy decision makers with new insights and unbiased knowledge of socio-economic trends. As the number of Earth-observing devices grows and their data output expands, Orbital Insight’s geospatial analytics platform finds observational truth in an interconnected world. We map out and quantify the world’s complexities so that organizations can make more informed decisions.”
“By applying artificial intelligence to satellite, UAV, and other geospatial data sources, we seek to discover and quantify societal and economic trends on Earth that are indistinguishable to the human eye. Combining this information with terrestrial data, such as mobile and location-based data, unlocks new sources of intelligence.”
5. Additional reading related to US optical reconnaissance satellites
You’ll find more information on the NRO’s film-return, optical reconnaissance satellites (KH-1 to KH-9) at the following links:
Robert Perry, “A History of Satellite Reconnaissance,” Volumes I to V, National Reconnaissance Office (NRO), various dates 1973 – 1974; released under FOIA and available for download on the NASA Spaceflight.com website, here: https://forum.nasaspaceflight.com/index.php?topic=20232.0
George Orwell’s novel Nineteen Eighty-Four was published 70 years ago, on 8 June 1949. Together with his political allegory Animal Farm published in 1945, Nineteen Eighty-Four brought Orwell worldwide fame. As I hope you know, Nineteen Eighty-Four describes a dystopian future occurring in 1984 (now 35 years in our past) in which a totalitarian government imposes repressive regimentation on all persons and behaviors through prescriptive laws, propaganda, manipulation of history, and omnipresent surveillance. Fortunately for us, the real year 1984 fared much better. However, Orwell’s vision of the future, as expressed in this novel, still may be a timely and cautionary tale of a future yet to come.
First edition cover. Source: Wikipedia
George Orwell. Source: BBC
You’ll find an interesting collection of quotations attributed to George Orwell on the AZ Quotes website here:
You can read Nineteen Eighty-Four chapter-by-chapter online on The Complete Works of George Orwell website at the following link, which also contains other Orwell novels.
Here, it’s easy to search the whole novel for key words and phrases, like “Though Police,” “Big Brother,” “Ministry of Truth,” “thoughtcrime,” “crimethink,” and “face crime,” and see how they are used in context.
Orwell was right about the concept that an entire population can be kept under constant surveillance. However, he probably didn’t appreciate the commercial value of such surveillance and that people voluntarily would surrender so much information into an insecure (online) environment, thereby making it easy for agents to legally or illicitly collect and process the information they want. Today, it’s hard to know if Big Brother is the government or anonymous aggregations of commercial firms seeking to derive value from your data and influence your behavior.
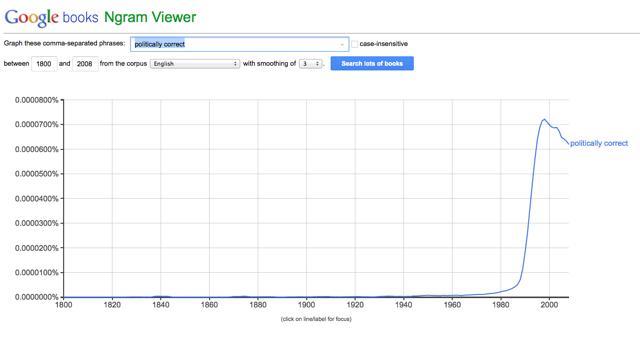
With the increasing polarization in our society today, it seems to me that we are entering more precarious times, where our own poorly defined terms, such as “politically correct” and “hate speech,” are becoming tools to stifle alternative views and legitimate dissent.
I remember in the late 1970s when I first read the words “politically correct” in Jim Holman’s local San Diego newspaper, Reader. My first reaction to this poorly defined term was that it will lead to no good. Since then, use of “politically correct” has grown dramatically, as shown in the following Google Ngram. While I agree that political correctness has its place in a polite society, the muddled jargon of political correctness easily can becomes a means to obfuscate a subject under discussion.
Ngram 1800 – 2008. Source: Google
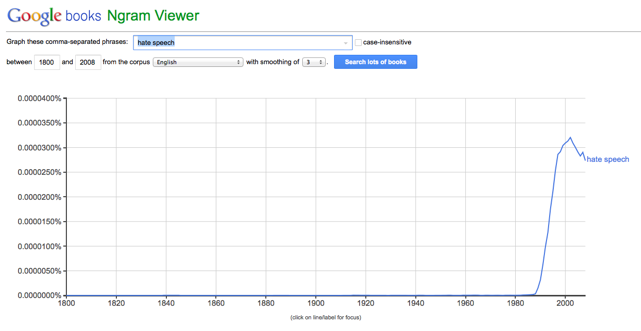
In the past two decades, use of the term “hate speech” has become commonplace, as shown in the following Google Ngram. While laws have been written to define and combat actual “hate speech,” this term is easily misused to stifle dissent, even legitimate dissent, by forcefully mischaracterizing one side of a discussion that never was intended to be hateful. Our ability to hold opposing views without being mischaracterized as a “hater” is being eroded in our increasingly polarized society, where self-appointed (and often anonymous) Thought Police are using social media (What an oxymoron!) to punish the perceived offenders. Such “policing” is not centralized, as in Orwell’s novel, but its effects can be very damaging to its victims.
Ngram 1800 – 2008. Source: Google
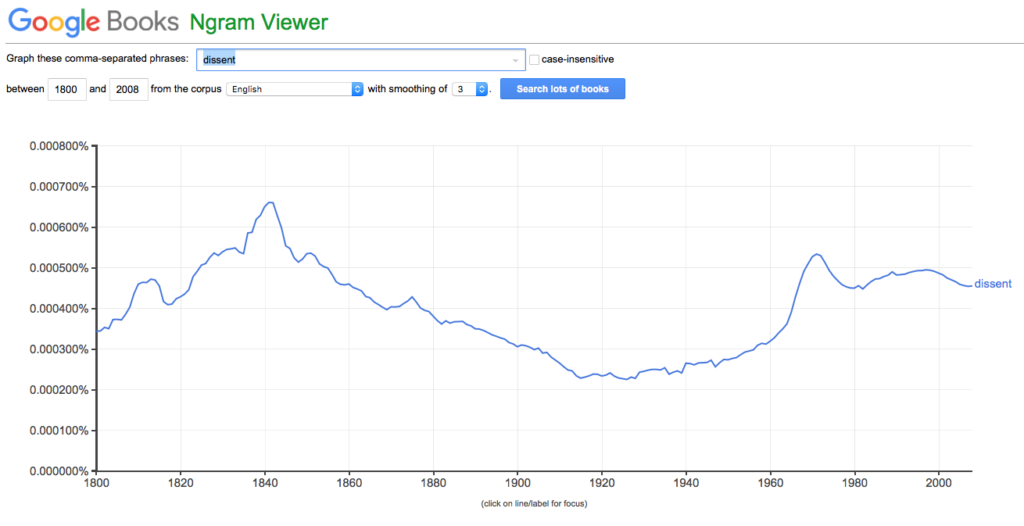
Of course, the word “dissent” has been in common usage for a very long time and is a fundamental right of American citizens.
Ngram 1800 – 2008. Source: Google
Seventy years after first being published, Orwell’s novel Nineteen Eighty-Four still stands as a relevant cautionary tale for our own future. I encourage you to read it again, keep an open mind, and piss off the self-declared Thought Police from time to time.
Higgins landing craft are the ubiquitous, flat-bottomed, shallow-draft, barge-like boats used widely throughout WW II to deliver troops, vehicles and supplies from offshore ship to the beach during opposed (the enemy was shooting back) amphibious landings. Designed by Andrew Jackson Higgins, these boats were built in large quantities at the Higgins Industries shipyard in New Orleans, LA, using a diverse labor force.
The Higgins Memorial Project provides a biography of A. J. Higgins at the following link:
The biographer notes: “In 1964, Dwight D. Eisenhower called Andrew Jackson Higgins ‘the man who won the war for us’. Without Higgins’ famous landing crafts (LCPs, LCPLs, LCVPs, LCMs), the strategy of World War II would have been much different and winning the war much more difficult.”
Andrew Jackson Higgins Source: Higgins Memorial Project
Higgins designed more than 60 types of landing craft, all built largely of mahogany plywood (same as the Higgins and other WW II PT boats), with a strong, internal wooden frame structure, and limited use of steel. By the end of WW II, Higgins Industries has built more than 20,000 boats; 12,500 of them were LCVPs.
The first Higgins boats be used were the LCPs (Landing Craft, Personnel) and LCP(L)s (Landing Craft, Personnel, Large), which did not have a bow loading ramp. Men had to jump over the gunwales after the boat landed on the beach.
Higgins LCP(L). Source: Wikipedia
Higgins LCVPs (Landing Craft, Vehicle, Personnel) were the primary way that soldiers, sailors, Marines and supplies got to the beaches of Normandy on D-Day. The LCVPs has a steel bow loading ramp and steel armor plate added on the exterior of the hull. They could ferry a platoon-sized complement of 36 soldiers with their equipment to shore at 9 knots (17 kph). LCMs (Landing Craft, Mechanized) carried larger vehicles, including tanks, to shore.
At the following link, you can read a 3 June 2019 article by David Kindy, “The Invention That Won World War II – Patented in 1944, the Higgins boat gave the Allies the advantage in amphibious assaults.”
That article notes one of the few surviving LCVPs is now on display outside of the U.S. Patent and Trademark Office headquarters and National Inventors Hall of Fame Museum in Alexandria, Virginia.
The men who rode into combat during WW II in these little vessels were very brave men. We owe them a debt of gratitude for their costly success in storming the beaches of Normandy 75 years ago and turning the tide of WW II.
In an effort to improve the generating and economic performance of wind turbines, manufacturers have been designing and building increasingly larger machines. Practical limits on transporting these very long and heavy components between the factories and the installation sites may limit the scale of the wind turbines selected for some applications and may require novel solutions that affect component design, factory siting and choice of transportation mode. In this post, we’ll take a look at these issues.
1. The latest generation of wind turbines
1.1 GE Cypress platform
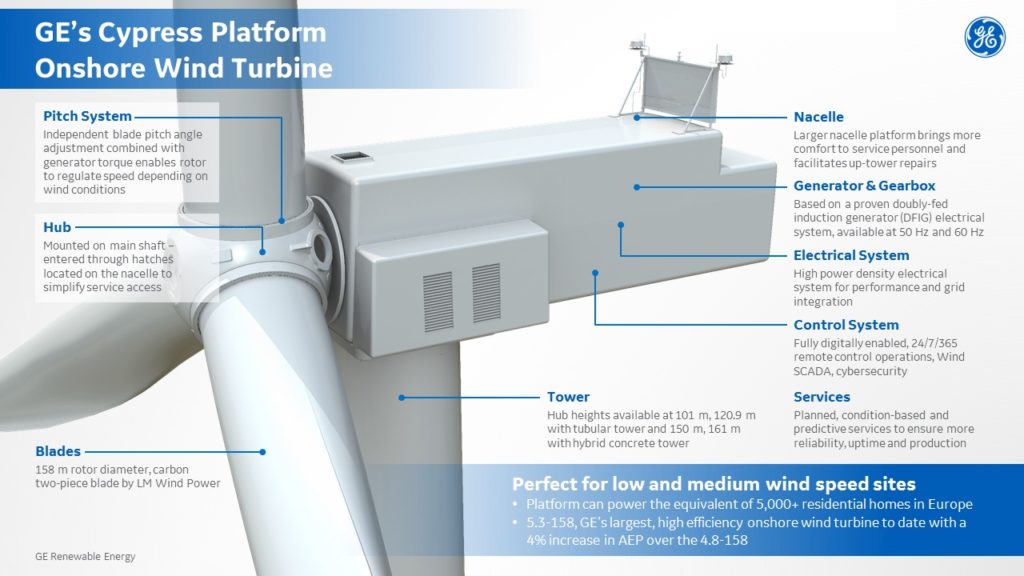
On 13 March 2019, General Electric (GE) Renewable Energy announced that its largest onshore wind turbine prototype, named Cypress, started commercial operation in the Netherlands. Unlike other large wind turbines, the prototype Cypress composite turbine blades come in two pieces and are assembled on site. Cypress was announced in September 2017 and construction of the prototype began in 2018.
The 5.3 MW Cypress prototype wind turbine. Source: GE
The Cypress 5.3-158 prototype has a nominal generating capacity of 5.3 MW. A smaller Cypress 4.8-158 (with a 4.8 MW rating) is currently under production at GE’s Salzbergen, Germany factory, and it is expected to be commissioned by the end of the 2019. Both have a rotor diameter of 158 meters (518.3 ft).
Anatomy of a GE Cypress wind turbine. Source: GE
GE reports that the Cypress platform is “powered by a revolutionary two-piece blade design that makes it possible to use larger rotors and site the turbines in a wider variety of locations. The Annual Electricity Production (AEP) improvements from the longer rotors help to drive down Levelized Cost of Electricity (LCOE), and the proprietary blade design allows these larger turbines to be installed in locations that were previously inaccessible.” Site accessibility can be limited by the practicality of ground transportation of single-piece blades that can be nearly 91.4 meters (300 feet) long.
1.2 GE LM 88.4 P, the longest one-piece rotor blade in the world
LM Wind Power, a GE Renewable Energy business, has delivered the longest one-piece wind turbine blades built to date, the LM 88.4 P, which measure 88.4 meters (290 ft) long. Three of these giant blades are installed onshore in Denmark on an Adwen’s AD 8-180 wind turbine, which has an 8 MW nominal generating capacity and a 180 meter (590.5 ft) rotor diameter. You can get a sense of the size of an LM 88.4 P in the following photo showing a rotor blade leaving the factory.
88.4 meter (290 ft) LM 88.4 P wind turbine rotor blade leaving the factory. Source: LM Wind Power
1.3 GE Haliade-X platform
GE is developing an even larger wind turbine platform, the Haliade X, which will become the world’s largest wind turbine when it is completed. This 12 MW platform, which is being developed primarily for offshore wind farms, features 107 meter (351 ft) long one-piece blades and a 220 meter (722 ft) rotor diameter. The first prototype unit will be installed onshore near Rotterdam, Netherlands, where it will stand 259 meters (850 ft) tall, from the base of the tower to the top of the blade sweep.
Anatomy of a GE 12 MW Haliade-X wind turbine. Source: GE
Construction of the prototype Haliade-X wind turbine began in 2019. The first blade is shown in the photo below. After securing a “type certificate” for the Haliade-X platform, GE plans to start selling this wind turbine commercially as early as 2021. The near-term market focus appears to be new wind turbines sited in the North Sea.
The first 107 meter (351 ft) Haliade-X blade at the factory in Cherbourg, France. Source GE Renewable Energy
1.4 Siemens Gamesa SG 10.0-193 DD platform
In January 2019, Siemens Gamesa launched its next generation (Generation V) of very large offshore wind turbines, the SG 10.0-193 DD, which has a nominal generator rating of 10 MW, blade length of 94 meters (308 ft) and a rotor diameter of 193 meters (633 ft). The nacelle housing the wind turbine hub and generator weighs up to 400 tons.
The 10 MW Siemens SG 10.0-193 DD. Source: Siemens Gamesa
1.5 Vestas EnVestusTM platform
The EnVestusTM platform, which was introduced in 2019, is Vestas’ next generation in its evolution of wind turbines. The V162-5.6 MW has a rotor diameter of 162 meters (531 ft), which is the largest rotor size offered in the current EnVestusTM product portfolio. Various tower sizes are offered, with hub heights up to 166 meters (545 ft). With this tallest tower, the blade sweep of a V162-5.6 MW wind turbine reaches a height of 247 meters (810 ft).
V162-5.6 MW nacelle. Source: Vestas
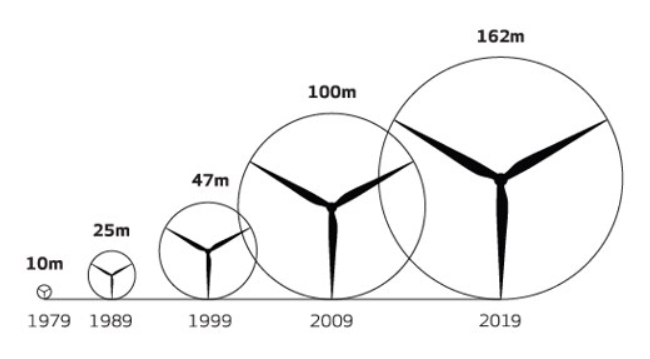
The trend in Vestas wind turbine maximum rotor size is evident in the following diagram. In comparison, the largest GE wind turbine, the Haliade-X will have a rotor diameter of 220 meter (722 ft), and the largest Siemens Generation V wind turbine will have a rotor diameter of 193 meters (633 ft).
2. Transporting very large wind turbine components
The manufacturer’s efforts to improve wind turbine generating and economic performance has resulted in increasingly larger machine components, which are challenging the limits of today’s transportation infrastructure as the components are moved from the manufacturer’s factories to the installation sites. Here, we’ll look at the various ways these large components are transported.
2.1 Transportation of wind turbine components by land
Popular Mechanics reported that, “Moving long turbine blades is such a logistical nightmare that the companies involved sometimes resort to building new roads for the sole purpose of moving blades.” Transporting wind turbine tower and nacelle components can be equally challenging. You’ll find an interesting assessment by CGS Labs of the challenges of wind farm ground transportation planning at the following link: https://www.cgs-labs.com/Software/Autopath/Articles/Windturbinetransport.aspx
As noted previously, the GE one-piece LM 88.4 P, which is 88.4 meters (290 ft) long, is the longest wind turbine rotor blade currently in service. You can watch a short video of a single LM 88.4 P blade being transported 218 km (135 miles) to the construction site at the following link. Total transport weight was 60 tons (120,000 lb, 54,431 kg). https://www.lmwindpower.com/en/products-and-services/blade-types/longest-blade-in-the-world
88.4 meter (290 ft) LM 88.4 P wind turbine blade during transport. Source: Screenshot from LM Wind Power video
Specialized trucks are employed to negotiate existing roads. Examples of difficult transportation situations are shown in the following photos.
Siemens 75 m (243 ft) rotor blade was transported 320 km (199 miles) by road. Source: utilities-me.com, 14 Aug 2012Making a sharp turn with a specialized truck for transporting a Vestas V117 57.5 meter (189 ft) wind turbine blade. Source: CNN.com, 5 October 2017
Specially-designed trucks move 52.4 meter (172 foot) long wind turbine blades on narrow roads on Baoding Mountain in China. Source: Business Insider, 2 Mar 2017
2.2. Transportation of wind turbine components by sea
The single-piece blades for the GE Haliade X wind turbine are so long that they couldn’t be transported by land from GE’s existing factories. Therefore, a new LM Wind Power blade factory for the offshore wind market was built in Cherbourg, France, on the banks of the English Channel in Normandy. This factory can load blades directly onto ships for delivery to offshore wind turbine sites.
GE wind turbine blades shipped by sea. Source: LM Wind Power
In December 2016, Siemens Gamesa reported, “When our new factories in Hull, England and Cuxhaven, Germany become fully operational, and both Ro-Ro (“roll-on, roll-off”) vessels are in service as interconnection of our manufacturing and installation network, we expect savings of 15-20 percent in logistics costs compared to current transport procedures. This is another important contributor reducing the cost of electricity from offshore wind.”
The Hull, UK rotor blade factory, located at the Alexandra Docks on the harbor, was completed in 2016. The Esbjerg, Denmark factory also is located on the harbor with direct access to shipping.
In 2018, Siemens Gamesa opened its modern factory in Cuxhaven, Germany for manufacturing offshore wind turbine nacelles. These three Siemens wind turbine factories have direct Ro-Ro access to shipping.In November 2016, Siemens commissioned its first specialized Ro-Ro transport vessel, the Rotra Vente. This ship is designed to transport multiple heavy nacelles, or up to nine tower sections, or three to four sets of rotor blades, depending on what else is being transported. A second specialized Ro-Ro transport vessel, the Rotra Mare, was commissioned in the spring of 2017 to transport tower sections and up to 12 rotor blades. These specialized transport vessels link the Siemens factories and transport the finished wind turbine components to the respective installation harbor.
The Rotra Vente provides Ro-Ro access for large Siemens wind turbine components. Source: Siemens
2.3. Transportation of wind turbine components by airship
For more than two decades, there has been significant interest in the use of modern lighter-than-air craft and hybrid airships in a variety of heavy-lift roles. One such role is the transportation of large wind turbine components. Airships offer the potential to transport the components quickly between factory and installation site without the constraints of current ground and sea transportation networks.
Three examples of airship concepts for transporting wind turbine components are described below.
Hybrid airships
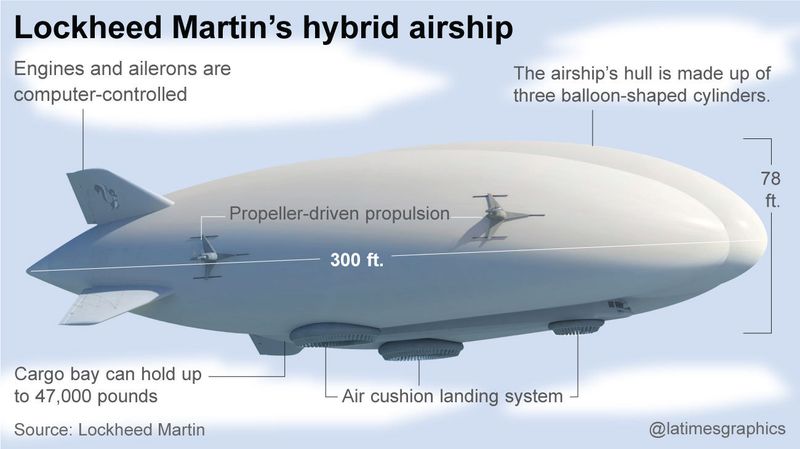
In 2017, Lockheed-Martin proposed its LMH-1 hybrid airship to deliver large wind turbine components weighing up to 23.5 tons (47,000 lb; 21,000 kg). The LMH-1 will be capable of flying 1,400 nautical miles (2,593 km) at a speed of about 70 knots (80 mph, 129 kph). Lockheed-Martin is expected to fly the commercial prototype of its LMH-1 hybrid airship in 2019. You can read Lockheed-Martin’s proposal for airship transport of wind turbine components here: https://www.lockheedmartin.com/content/dam/lockheed-martin/eo/documents/webt/transporting-wind-turbine-blades.pdf
This type of airship conducts short takeoff and landing (STOL) operations when transporting heavy loads, but can operate from relatively unprepared sites. When off-loading heavy cargo, this airship must take on ballast at the landing site.
After LMH-1, Lockheed Martin has plans to build a medium-size (90 ton cargo) hybrid airship that would be more competitive with trucking and rail transport.
Anatomy of the LMH-1 hybrid airship. Source: Lockheed Martin
Variable buoyancy airships
In January 2013, Worldwide Aeros Corp. (Aeros), located in Montebello, CA, conducted the first “float test” of their Dragon Dream variable buoyancy airship. More recently, Aeros has reported that they are working on the first commercial prototype of a larger variable buoyancy airship to be known as the ML866 / Aeroscraft Gen 2, which will be 169 meters (555 ft) long. This airship is being designed with great range (3,100 nautical miles; 5,741 km) and a cruise speed of 100 – 120 knots. The ML866 will have a cargo capacity of 66 tons (132,000 lb; 59,874 kg). The first ML866 prototype is not expected to fly before the early 2020s.
This type of airship is designed to conduct vertical takeoff and landing (VTOL) operations with a full cargo load, and can hover above a site and take on or deliver cargo without landing and without transferring ballast to/from the ground site.
Concept drawing of an Aeroscraft variable buoyancy airship delivering wind turbine blades to a site. Source: Worldwide Aeros Corp.
Semi-rigid airships
The KNARR initiative is a project created by two Danish design architects, Rune Kirt and Mads Thomsen to design a freight solution using modern airships to reduce the cost and energy consumption of today’s wind turbine freight business and make the logistics for wind turbine freight simpler and more efficient. Their main point is that transportation and installation costs can be up to 60% of the total cost of a new wind turbine, and these activities have a large carbon footprint. Their solution is a modern airship that is designed specifically for transporting very large and heavy wind turbine components directly from the manufacturer’s factory to the installation site. For their work, they were awarded both the Danish Design Center’s Special Prize and the International Core77 Design “Speculative Concept.”. You can read more about the firm, KIRT x THOMSEN aps, and the KNARR initiative here: https://www.kirt-thomsen.com/case10_airship-knarr
The KNARR semi-rigid airship would be 360 meters (1,181 ft) long and would carry the wind turbine components in a large internal cargo bay. This type of airship is designed to conduct VTOL operations with a full cargo load. When off-loading heavy cargo, this airship must take on ballast at the landing site.
The KNARR airship is a concept only. No prototype is being built at this time. You can view a short video defining the wind turbine transport application of KNARR airship here: https://vimeo.com/21023051
Concept drawing of a KNARR airships it lifts off after making a delivery. Source: https://www.kirt-thomsen.com/Concept drawing of a KNARR airship flying over a wind farm. Source: https://www.kirt-thomsen.com/
3. Conclusions
The scale of the latest generation of wind turbines, particularly the GE LM 88.4 P, which measure 88.4 meters (290 ft) long, is approaching the limits of existing ground transportation infrastructure to handle delivery of such blades from the factory to the installation site. GE’s introduction of two-piece blades on their new Cypress platform will significantly improve the logistics for delivering these large blades to installation sites.
Siemens’ practice of siting its wind turbine component factories with ready access to Ro-Ro shipping at an adjacent port facility greatly reduces the complexity of delivering large components to a port near an installation site. GE has adopted the same approach with their latest factory for manufacturing the Haliad-X rotor blades in Cherbourg, France, on the English Channel.
Airships could revolutionize the transportation of large, heavy items such as wind turbine components. However, the earliest likely candidate, the Lockheed Martin LMH-1 will not be available until the early 2020s and will be limited to a maximum load of 23.5 tons (47,000 lb; 21,000 kg). It seems unlikely that larger heavy-lift airships will be introduced before about 2025.
So, in the meantime, we’ll see the largest wind turbines being installed in offshore sites. For onshore sites, we’ll see more creative ground transportation schemes, and, probably, a broader introduction of multi-part rotor blades.
4. Recommended additional reading on wind turbines:
The best current supercomputers are “petascale” machines. This term refers to supercomputers capable of performing at least 1.0 petaflops [PFLOPS; 1015 floating-point operations per second (FLOPS)], and also refers to data storage systems capable of storing at least 1.0 petabyte (PB; 1015 bytes) of data.
In my 13 November 2018 post, I reported the latest TOP500 ranking of the world’s fastest supercomputers. The new leaders were two US supercomputers: Summit and Sierra. A year later, in November 2019, they remained at the top of the TOP500 ranking.
Summit: The #1 ranked IBM Summit is installed at the Department of Energy’s (DOE) Oak Ridge National Laboratory (ORNL) in Tennessee. It has a LINPACK Benchmark Rmax (maximal achieved performance) rating of 148.6 PFLOPS (1.486 x 1017 FLOPS) and an Rpeak (theoretical peak performance) rating of 200.8 PFLOPS. Summit’s peak electric power demand is 10.01 MW (megawatts).
Sierra:The #2 ranked IBM Sierra is installed at the DOE’s Lawrence Livermore National Laboratory (LLNL) in California. It has an Rmax rating of 94.64 PFLOPS (0.9464 x 1017 FLOPS) and an Rpeak rating of 125.7 PFLOPS. Sierra’s peak electric power demand is 7.44 MW.
The next update of the TOP500 ranking will be in June 2020. Check out their website here to see if the rankings change: http:// https://www.top500.org
New exascale machines are only a year or two away
The next big step up in supercomputing power will be the arrival of “exascale” machines, which refers to supercomputers capable of performing at least 1.0 exaflops (EFLOPS; 1018 FLOPS), and also refers to data storage systems capable of storing at least 1.0 exabyte (EB, 1018 bytes) of data. As you might suspect, there is intense international completion to be the first nation to operate an exascale supercomputer. The main players are the US, China and Japan.
In the US, DOE awarded contracts to build three new exascale supercomputers:
Aurora, announced in March 2019
Frontier, announced in May 2019
El Capitan, announced in March 2020
In this post, we’ll take a look at these three new supercomputers, each of which will be about ten times faster than the existing TOP500 leaders, Summit and Sierra.
Aurora supercomputer for ANL
The Aurora supercomputer is being built at Argonne National Laboratory (ANL) by the team of Intel (prime contractor) and Cray (subcontractor), under a contract valued at more than $500 million.
Aurora supercomputer concept drawing. Source: DOE / Argonne National Laboratory
The computer architecture is based on the Cray “Shasta” system and Intel’s Xeon Scalable processor, Xe compute architecture, Optane Datacenter Persistent Memory, and One API software. Those Cray and Intel technologies will be integrated into more than 200 Shasta cabinets, all connected by Cray’s Slingshot interconnect and associated software stack.
Aurora is expected to come online by the end of 2021 and likely will be the first exascale supercomputer in the US. It is being designed for sustained performance of one exaflops. An Argonne spokesman stated, “This platform is designed to tackle the largest AI (artificial intelligence) training and inference problems that we know about.”
The Frontier supercomputer is being built by at ORNL by the team of Cray (prime contractor) and Advanced Micro Devices, Inc. (AMD, subcontractor), under a contract valued at about $600 million.
Frontier supercomputer concept drawing. Source: DOE / Oak Ridge National Laboratory
The computer architecture is based on the Cray “Shasta” system and will consist of more than 100 Cray Shasta cabinets with high density “compute blades” that support a 4:1 GPU to CPU ratio using AMD EPYC processors (CPUs) and Radeon Instinct GPU accelerators purpose-built for the needs of exascale computing. Cray and AMD are co-designing and developing enhanced GPU programming tools.
Frontier is expected to come online in 2022 after Aurora, but is expected to be more powerful, with a rating of 1.5 exaflops. Frontier will find applications in deep learning, machine learning and data analytics for applications ranging from manufacturing to human health.
The El Capitan supercomputer, announced in March 2020, will be built at LLNL by the team of Hewlett Packard Enterprise (HPE) and AMD under a $600 million contract. El Capitan is funded by the DOE’s National Nuclear Security Administration (NNSA) under their Advanced Simulation and Computing (ASC) program. The primary users will be the three NNSA laboratories: LLNL, Sandia National Laboratories and Los Alamos National Laboratory. El Capitan will be used to perform complex predictive modeling and simulation to support NNSA’s nuclear weapons life extension programs (LEPs), which address aging weapons management, stockpile modernization and other matters.
El Capitan supercomputer concept drawing. Source: Hewlett Packard Enterprise
El Capitan’s peak performance is expected to exceed 2 exaflops, making it about twice as fast as Aurora and about 30% faster than Frontier.
LLNL describes the El Capitan hardware as follows: “El Capitan will be powered by next-generation AMD EPYC processors, code-named ‘Genoa’ and featuring the ‘Zen 4’ processor core, next-generation AMD Radeon Instinct GPUs based on a new compute-optimized architecture for workloads including HPC and AI, and the AMD Radeon Open Compute platform (ROCm) heterogeneous computing software.”
Hewlett Packard Enterprise acquires Cray in May 2019
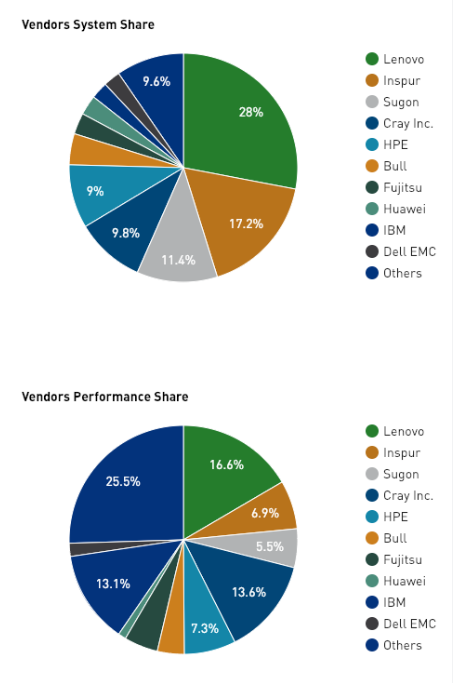
On 17 May 2019, Hewlett Packard Enterprise (HPE) announced that it has acquired Cray, Inc. for about $1.3 billion. The following charts from the November 2018 TOP500 report gives some interesting insight into HPE’s rationale for acquiring Cray. In the Vendor’s System Share chart, both HPE and Cray have a 9 – 9.6% share of the market based on the number of installed TOP500 systems. In the Vendor’s Performance Share chart, the aggregate installed performance of Cray systems far exceeds the aggregate performance of a similar number of lower-end HPE systems (25.5% vs. 7.3%). The Cray product line fits above the existing HPE product line, and the acquisition of Cray should enable HPE to compete directly with IBM in the supercomputer market. HPE reported that it sees a growing market for exascale computing. The primary US customers are government laboratories.
The March 2020 award of NNSA’s El Capitan supercomputer to the HPE and AMD team seems to indicate that HPE made a good decision in their 2019 acquisition of Cray.
TOP500 ranking of supercomputer vendors, Nov 2018 Source: https://www.top500.org
Meanwhile in China:
On 19 May 2019, the South China Morning Post reported that China is making a multi-billion dollar investment to re-take the lead in supercomputer power. In the near-term (possibly in 2019), the newest Shuguang supercomputers are expected to operate about 50% faster than the US Summit supercomputer. This should put the new Chinese super computers in the Rmax = 210 – 250 PFLOPS range.
In addition, China is expected to have its own exascale supercomputer operating in 2020, a year ahead of the first US exascale machine, with most, if not all, of the hardware and software being developed in China. This computer will be installed at the Center of the Chinese Academy of Sciences (CAS) in Beijing.
Why, zettascale, of course. These will be supercomputers performing at least 1.0 zettaflops (ZFLOPS; 1021 FLOPS), while consuming about 100 megawatts (MW) of electrical power.
The Phoenix Unmanned Aerial Vehicle (UAV) is a small, autonomous airship designed to serve as a very long endurance, high-altitude “atmospheric satellite” that is capable of station keeping using an innovative variable buoyancy propulsion system. The UAV is intended for use in telecommunications and a range of other civil and military applications.
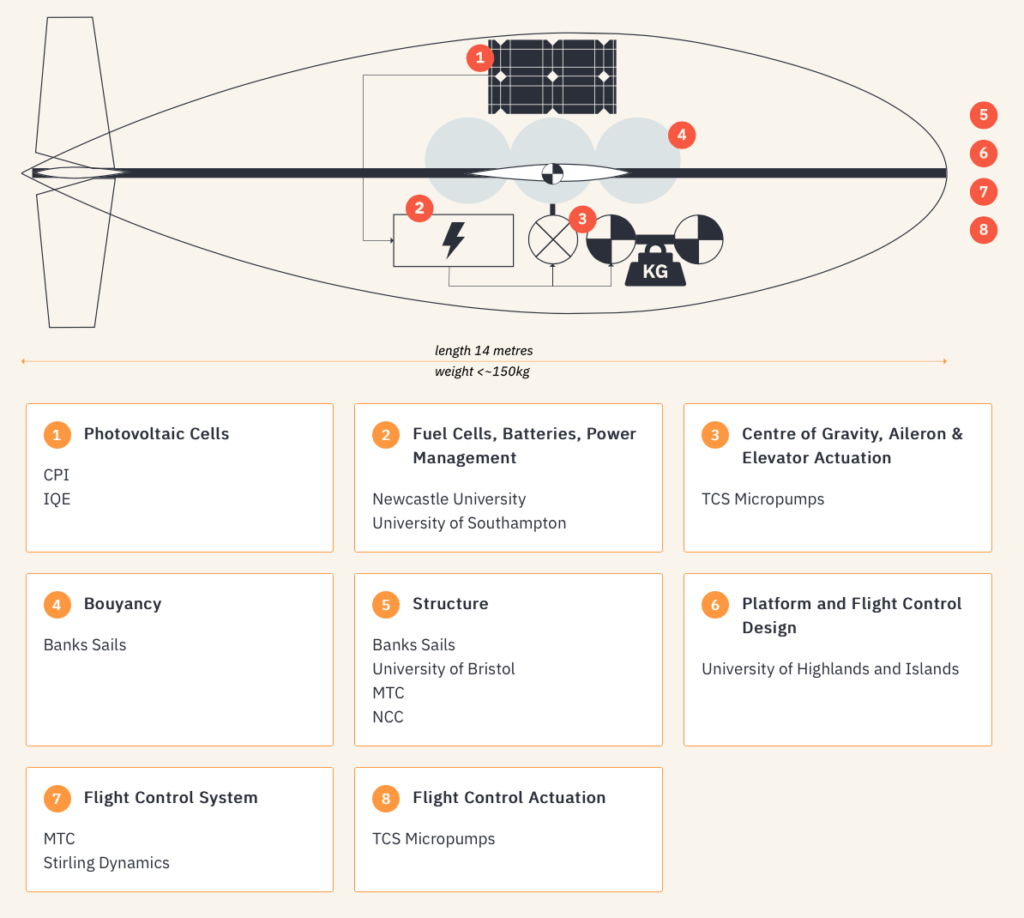
Phoenix development is being lead by a consortium of UK universities, businesses, and innovation centers, with a distribution of roles and responsibilities as shown in the following graphic.
Source: https://phoenixuas.co.uk
This project runs for three years. It is one of several projects supported the UK’s Department for Business, Energy & Industrial Strategy (BEIS), through the Aerospace Technology Institute (ATI) and Innovate UK, to invest in “research and technology projects to deliver world leading aerospace technologies in the UK.”
The Phoenix UAV is a small, variable buoyancy airship measuring 15 meters (49 feet) long, with a wingspan of 10.5 meters (34 feet). The UAV’s teardrop-shaped fuselage is constructed from a Vectran fabric, with short wings and a cruciform tail made of carbon fiber composite material. Thin film solar panels on the wing and horizontal stabilizer surfaces generate electric power for the UAV’s systems and to charge an onboard battery that provides continuous power at night and during inclement weather.
The fuselage contains 120 cubic meters (4,238 cubic feet) of helium lifting gas (hydrogen is an alternative), a supply of lifting gas, and a separate inflatable 6 cubic meter (212 cubic feet) cell containing heavier air. I would expect that the Phoenix is ballasted for near neutral buoyancy so that the control span of the buoyancy control system can produce both positive and negative buoyancy.
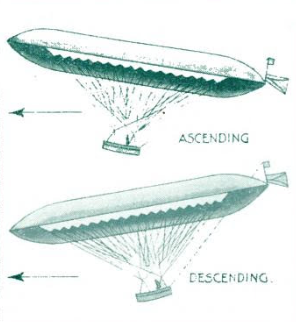
To increase buoyancy, air in the inflatable cell is released to the atmosphere via a vent in the tail. If needed, lifting gas can be released to the gas envelope to gain positive buoyancy. As the lighter-than-air Phoenix gains altitude, the aerodynamic surfaces generate forward momentum, propelling the UAV forward during the unpowered climb.
At the top of the climb, buoyancy is decreased by pumping outside air into the inflatable cell, increasing the gross weight of the UAV. As the now heavier-than-air Phoenix enters an unpowered dive, the aerodynamic surfaces continue generating forward momentum to propel the UAV.
During an extended mission, the climb-dive cycle is repeated as often as needed to provide propulsion for controlling the position of the UAV.
First indoor flight. Source: https://phoenixuas.co.uk
On 21 March 2019, the Phoenix UAV made its first successful flight indoors, covering about 120 meters (394 feet) and becoming the world’s first large variable buoyancy powered autonomous UAV. Outdoor tests will be conducted after the UK Civil Aviation Authority certifies the UAV. As currently configured the developers expect that Phoenix can operate at altitudes up to about 914 meters (3,000 feet).
You can watch a short video of the first flight here:
But was it the first ever flight of an airship using variable buoyancy propulsion?
No, it wasn’t. First there was Aereon in the 1860s and then there was AHAB in the early 2000s.
2. Aereon
Back in the 1860s, Dr. Solomon Andrews invented the directionally maneuverable, hydrogen-filled airship named Aereonthat used variable buoyancy and airflow around the airship’s gas envelope to provide propulsion without an engine. The gas envelope on the original Aereon airship consisted of three side-by-side, cigar-shaped balloons, each with seven internal cells containing the hydrogen lifting gas. The balloons formed a gas envelope measuring 80 feet (24.4 meters) long and 13 feet (4 meters) wide.
Buoyancy of the airship was controlled by venting some hydrogen lift gas or dropping some sand ballast.
The angle-of-attack (pitch angle) of the gas envelope was controlled by moving the center of gravity of the gondola (i.e., by moving people in the gondola fore and aft as needed)
Propulsive force was generated by alternating between positive buoyancy (lighter-than-air) flight and negative buoyancy (heavier-than-air) flight, and by coordinating the pitch angle of the gas envelope.
During a buoyant ascent, the pitch angle was adjusted to as much as 15 degrees up. Air flow along the top surface of the envelope moved from bow to stern and drove the airship forward. The airship can continue to ascend until it reaches its “pressure altitude” where the decreasing atmospheric air density reduces airship buoyancy from positive to neutral.
During a semi-buoyant descent, the pitch angle was adjusted to as much as 15 degrees down. Air flow along the bottom surface of the envelope moved from bow to stern and continued to drive the airship forward.
Direction was controlled by a rudder at the stern of the airship
Source: Popular Science Monthly, January 1932
Andrews first flew Aereon over Perth Amboy, NJ on 1 June 1863 and flew at least three times more. With Aereon, he demonstrated the ability to fly in any direction, including against the wind, make broad 360 degree turns, and navigate back to and land at his starting point. Aereon’s gondola could carry the pilot and three passengers.
On 5 July 1864, the US Patent Office issued Patent # 43,449 to Solomon Andrews for his invention of a balloon that was capable of directed flight and could even be flown against the wind. You can read the patent here: https://patents.google.com/patent/US43449
Lithograph of Solomon Andrews’s first airship “Aereon” Source: United States Library of Congress’s Prints and Photographs division, digital ID cph.3b01438.
Andrews’ second airship, Aereon 2, had a different gas envelope design, described as “a flattened lemon, sharply pointed at both ends.” Aereon 2 also used a different approach for controlling buoyancy. The new approach used a complex set of ropes and pulleys to squeeze or release external pressure on the hydrogen gas bags, thereby changing their volume and how much air was being displaced. Aereon 2 flew over New York City on 25 May and 5 June 1866. The second trip ended up about 30 miles away with a landing in Oyster Bay, Long Island. This was Andrews’ last flight.
Source: Skinner Auctioneers
Andrews organized the Aerial Navigation Company, which was chartered in November 1865 for “the transportation of passengers, merchandise and other matter from place to place.” The firm intended to build commercial airships and establish regular airship service between New York and Philadelphia. During the post-Civil War economic crisis, many banks failed and Aerial Navigation Co. went bankrupt, ending the plans for the first commercial passenger and freight air service in the world.
Source: Worthpoint
3. Advanced High-Altitude Aerobody (AHAB)
In the early 2000s, the Physical Science Lab at New Mexico State University was developing the Advanced High-Altitude Aerobody (AHAB), which consisted of a large, solar-powered, non-rigid, winged aerobody with the payload suspended below on several retractable cables. Changing the length of the cables moved the center of gravity and thereby controlled the attitude of the aerobody. Changing the buoyancy of the aerobody caused it to climb or descend. As with the Phoenix UAV and Solomon Andrews’ Aereon, a forward propulsive force was generated during each climb or descent maneuver. With this modest propulsion capability, AHAB was designed for station-keeping operations in near-space (very high altitude) where propellers would be ineffective.
In 2004, Mary Ann Stewart, et al., reported, “This superpressure balloon incorporates wing-like devices to give it a sleek aerodynamic shape. AHAB is designed to offset the effects of light winds by using a porpoising technique as necessary, trading altitude for horizontal motion. The craft is made up of a series of individual cells, and helium is pumped between cells to effect movement.”
Lt. Col Ed Tomme and Sigfred Dahl provided additional performance information, noting that such vehicles “will use a variety of unconventional buoyancy-modification schemes that allow vehicles to propel themselves by porpoising through the air at about 30 to 50 knots, enabling them to overcome all but the most unusual near-space winds.”
The AHAB airship. Source: adapted from Air & Space Power Journal, Winter 2005, Volume XIX, No. 4, p. 47
In the 1-14 July 2019 issue of Aviation Week & Space Technology magazine, former AHAB program manager, Mike Fisher, commenting on the new Phoenix UAV, provided the following historical insights on AHAB:
“The Aerobody was a solar-powered lighter-than-air vehicle (non-rigid rather than semi-rigid, as in the Phoenix) that pioneered the idea of using a ballonet to cause buoyancy and changes in center of gravity to enable propeller-less forward flight.
We took the concept far enough to demonstrate the validity of the underlying physics by building a subscale prototype that we successfully tested in indoor flight tests. Ultimately, the then-existing limits to photovoltaic cell and battery technology kept us from going past the prototype stage.”
What’s old is new again!
In the past two decades, winged underwater gliders implementing Andrews’ basic variable buoyance propulsion principle have been developed. See the 2001 article, “Autonomous Buoyancy-driven Underwater Gliders,” which you can read here:
Now, the UK Phoenix team has demonstrated variable buoyancy propulsion in a small, unmanned airship, 156 years after Solomon Andrews first flew the much larger Aereon with passengers in Perth Amboy, NJ, and almost two decades after the indoor test flight of the subscale AHAB prototype at New Mexico State University.
Best wishes to the UK Phoenix team in their efforts to develop an operational variable buoyancy propulsion system for a modern airship.
Additional resources on the Advanced High-Altitude Aerobody (AHAB)
Lt Col Edward Tomme & D. Phil, “The Paradigm Shift to Effects-Based Space: Near-Space as a Combat Space Effects Enabler,” Airpower Research Institute, Research Paper 2005-01, 2005;http://www.au.af.mil/au/awc/awcgate/cadre/ari_2005-01.pdf
Xiaotao Wu, “Modelling and control of an buoyancy driven airship,” Automatic Control Engineering, Ecole Centrale de Nantes (ECN); South China University of Technology, 2011; https://hal.archives-ouvertes.fr/tel-01146532/document
Xiaotao Wu & Claude Moog, “Full model of a buoyancy-driven airship and its control in the vertical plane,” Aerospace Science and Technology, Volume 26, Issue 1, April–May 2013, Pages 138-152; available for a fee at: https://www.sciencedirect.com/science/article/pii/S1270963812000545
The firm Northrop Grumman Innovation Systems (formerly Orbital ATK, and before that, Orbital Sciences Corporation) was the first to develop a commercial, air-launched rocket capable of placing payloads into Earth orbit. Initial tests of their modest-size Pegasus launch vehicle were made in 1990 from the NASA B-52 that previously had been used as the “mothership” for the X-15 experimental manned space plane and many other experimental vehicles.
Since 1994, Orbital ATK has been using a specially modified civilian Lockheed L-1011 TriStar, a former airliner renamed Stargazer, as a mothership to carry a Pegasus launch vehicle to high altitude, where the rocket is released to fly a variety of missions, including carrying satellites into orbit. With a Pegasus XL as its payload (launch vehicle + satellite), Stargazer is lifting up to 23,130 kg (50,990 pounds) to a launch point at an altitude of about 12.2 km (40,000 feet).
Orbital ATK’s Pegasus XL rocket released from Stargazer. Source: NASA / http://mediaarchive.ksc.nasa.gov
Paul Allen’s firm Stratolaunch Systems Corporation (https://www.stratolaunch.com) was founded in 2011 to take this air-launch concept to a new level with their giant, twin-fuselage, six-engine Stratolaunch carrier aircraft. The aircraft has a wingspan of 385 feet (117 m), which is the greatest of any aircraft ever built, a length of 238 feet (72.5 m), and a height of 50 feet (15.2 m) to the top of the vertical tails. The empty weight of the aircraft is about 500,000 pounds (226,796 kg). It is designed for a maximum takeoff weight of 1,300,000 pounds (589,670 kg), leaving about 550,000 pounds (249,486 kg) for its payload and the balance for fuel and crew. It will be able to carry multiple launch vehicles on a single mission to a launch point at an altitude of about 35,000 feet (10,700 m). A mission profile for the Stratolaunch aircraft is shown in the following diagram.
Typical air-launch mission profile. Source: Stratolaunch Systems
Stratolaunch rollout – 2017
Built by Scaled Composites, the Stratolaunch aircraft was unveiled on 31 May 2017 when it was rolled out at the Mojave Air and Space Port in Mojave, CA. Following is a series of photos from Stratolaunch Systems showing the rollout.
Stratolaunch ground tests – 2017 to 2019
Ground testing of the aircraft systems started after rollout. By mid-September 2017, the first phase of engine testing was completed, with all six Pratt & Whitney PW4000 turbofan engines operating for the first time. The first low-speed ground tests conducted in December 2017 reached a modest speed of 25 knot (46 kph). By January 2019, the high-speed taxi tests had reached a speed of about 119 knots (220 kph) with the nose wheel was off the runway, almost ready for lift off. Following is a series of photos from Stratolaunch Systems showing the taxi tests.
Stratolaunch first flight
The Stratolaunch aircraft, named Roc, made an unannounced first flight from the Mojave Air & Space Port on 13 April 2019. The aircraft stayed aloft for 2.5 hours, reached a peak altitude of 17,000 feet (5,180 m) and a top speed of 189 mph (304 kph). The following series of photos show the Stratolaunch aircraft during its first flight.
Source, above two photos: Stratolaunch SystemsSource: REUTERS/Gene Blevins/File PhotoLanding at the conclusion of the first flight. Source: Stratolaunch Systems
Stratolaunch posted an impressive short video of the first flight, which you can view here:
Stratolaunch family of launch vehicles: ambitious plans, but subject to change
In August 2018, Stratolaunch announced its ambitious launch vehicle development plans, which included the family of launch vehicles shown in the following graphic:
Up to three Pegasus XL launch vehicles from Northrop Grumman Innovation Systems (formerly Orbital ATK) can be carried on a single Stratolaunch flight. Each Pegasus XL is capable of placing up to 370 kg (816 lb) into a low Earth orbit (LEO, 400 km / 249 mile circular orbit).
Medium Launch Vehicle (MLV) capable of placing up to 3,400 kg (7,496 lb) into LEO and intended for short satellite integration timelines, affordable launch and flexible launch profiles. MLV was under development and first flight was planned for 2022.
Medium Launch Vehicle – Heavy, which uses three MLV cores in its first stage. That vehicle would be able to place 6,000 kg (13,228 lb) into LEO. MLV-Heavy was in the early development stage.
A fully reusable space plane named Black Ice, initially intended for orbital cargo delivery and return, with a possible follow-on variant for transporting astronauts to and from orbit. The space plane was a design study.
Stratolaunch was developing a 200,000 pound thrust, high-performance, liquid fuel hydrogen-oxygen rocket engine, known as the “PGA engine”, for use in their family of launch vehicles. Additive manufacturing was being widely used to enable rapid prototyping, development and manufacturing. Successful tests of a 100% additive manufactured major subsystem called the hydrogen preburner were conducted in November 2018.
Stratolaunch Systems planned family of launch vehicles announced in August 2018. Source: Stratolaunch Systems
After Paul Allen’s death on 15 October 2018, the focus of Stratolaunch Corp was greatly revised. On 18 January 2019, the company announced that it was ending work on its own family of launch vehicles and the PGA rocket engine. The firm announced, “We are streamlining operations, focusing on the aircraft and our ability to support a demonstration launch of the Northrop Grumman Pegasus XL air-launch vehicle.”
You’ll find an article describing Stratolaunch Systems’ frequently changing launch vehicle plans in an article on the SpaceNews website here:
Air launch offers a great deal of flexibility for launching a range of small-to-medium sized satellites and other aerospace vehicles. With only the Pegasus XL as a launch vehicle, and with Northrop Grumman having their own Stargazer carrier aircraft for launching the Pegasus XL, the business case for the Stratolaunch aircraft has been greatly weakened.
Stratolaunch’s main competition: The Northrop Grumman Stargazer at the Mojave Air and Space Port in January 2019, available for its next Pegasus XL launch mission. Source: Author’s photo
Additional competition in the airborne launch services business will come in 2020 from Richard Branson’s firm Virgin Orbit, with its airborne launch platform Cosmic Girl, a highly-modified Boeing 747, and its own launch vehicle, known as LauncherOne. Successful drop tests of LauncherOne were conducted in 2019. The first launch to orbit is expected to occur in 2020. You’ll find more information on the Virgin Orbit website here: https://virginorbit.com
An inert LauncherOne rocket falls away from its 747 carrier aircraft in a July 2019 drop test. Source: Virgin Orbit
Additional competition for small satellite launch services comes from the newest generation of small orbital launch vehicles, like Electron (Rocket Lab, New Zealand) and Prime (Orbix, UK), which are expected to offer low price launch services from fixed land-based launch sites. Electron is operational now, and achieved six successful launches in six attempts in 2019. Prime is expected to enter service in 2021.
In the cost competitive launch services market, Stratolaunch does not seem to have an advantage with only the Pegasus XL in its launch vehicle inventory. Hopefully, they have something else up their sleeve that will take advantage of the remarkable capabilities of the Stratolaunch carrier aircraft.
19 March 2020 Update: Stratolaunch change of ownership
Several sources reported on 11 October 2019 that Stratolaunch Systems had been sold by its original holding company, Vulcan Inc., to an undisclosed new owner. Two months later, Mark Harris, writing for GeekWire, broke the news that the private equity firm Cerberus Capital Management was the new owner. It appears that Jean Floyd, Stratolaunch’s president and CEO since 2015, remains in his roles for now. Michael Palmer, Cerberus’ managing director, was named Stratolaunch’s executive vice president. You can read Mark Harris’ report here: https://www.geekwire.com/2019/exclusive-buyer-paul-allens-stratolaunch-space-venture-secretive-trump-ally/
It will be interesting to watch as the new owners reinvent Stratolaunch Systems for the increasingly competitive market for airborne launch services.
Peter Lobner, updated 28 Jun 2019, 14 Dec 2019 & 12 May 2020
JASON and the Naval Research Advisory Committee (NRAC) are both established, independent advisory groups that have long histories of providing important scientific and technical advice to the U.S. government, primarily to Department of Defense (DoD) clients. The Pentagon cancelled the JASON and NRAC contracts in early 2019. Immediately, efforts were undertaken on several fronts to attempt to restore funding. The efforts on behalf of JASON were successful, but NRAC was not so fortunate.
Following is an overview of these two advisory groups and an update on their current status.
1. JASON
JASON is an independent advisory panel of elite scientists that was created in 1960 to address a wide range of scientific and technical issues, primarily for the U.S. military. Originally, the JASON panel had about 20 members, known informally as Jasons, increasing to about 40 members by the 1970s. JASON maintains its independence by requiring that new members be selected by its existing members rather than by external sponsors.
JASON is a very controversial organization with a very low public profile. For a good introduction to JASON, I recommend Ann Finkbeiner’s 2006 book, “The Jasons: The Secret History of Science’s Postwar Elite,” which is available from Amazon and other booksellers. You can watch an hour-long video created by Microsoft Research with Ann Finkbeiner providing an excellent narrative overview (no Powerpoint slides) on JASON here:
Ann Finkbeiner notes: “Working in secrecy to solve highly classified problems for the Department of Defense, CIA, and NSA is an elite group of scientific advisors who provide the government with analyses on defense and arms control and they call themselves JASON. Named for the hero in Jason and the Argonauts, the group grew out of the Manhattan Project and counts as its members scientists such as Freeman Dyson and Murray Gell-Mann. Of the roughly one hundred Jasons over time, 43 have been elected to the National Academy of Sciences, eight have won MacArthur awards, one a Field’s Medal, and 11 have won Nobel Prizes. Its members have gathered every summer since 1960, working in absolute secrecy and with unparalleled freedom. The Jasons’ work poses vital questions: what role should the government play in scientific research? At what point is the inventor accountable for the hazards of the invention?”
You’ll find a list of JASON research topics compiled on Wikipedia here:
Most of the resulting JASON reports are classified. You’ll find a list of unclassified JASON reports (and links) on the Federation of American Scientists (FAS) website at the following link: https://fas.org/irp/agency/dod/jason/
Since the late 1970s, the JASONs have been assigned tasks and been funded via Indefinite Delivery / Indefinite Quantity (IDIQ) contracts managed by MITRE Corporation. The Office of the Secretary of Defense (OSD) issued MITRE’s most recent five-year IDIQ contract for managing JASON tasking and funding. Task Orders are issued under the main IDIQ contract and the actual work is performed according to the individual task orders. The IDIQ contract structure broadly allows government agencies to commission a JASON study and fund it via a new task order. MITRE’s IDIQ contract expired on 31 March 2019. A follow-on IDIQ contract was in the works, but OSD cancelled that solicitation on short notice on 28 March 2019.
On 10 April 2019, the article, “Pentagon Cancels Contract for JASON Advisory Panel,” written by Steven Aftergood, was posted on the FAS website at the following link: https://fas.org/blogs/secrecy/2019/04/pentagon-jason/
Aftergood speculated that, “The Pentagon move to cancel the JASON contract appears to be part of a larger trend by federal agencies to limit independent scientific and technical advice.”
Additional resources related to JASON
See the following documents for more background information on JASON.
Joel Shurkin, “True Genius: The Life and Work of Richard Garwin, the Most Influential Scientist You’ve Never Heard of,” Prometheus Books, ISBN-13: 978-1633882232, 21 February 2017
Joël van der Reijden, “The JASON Group: National Security Science,” Institute for the Study of Globalization and Covert Politics (ISGP), originally written 20 August 2005, version 3.5 posted 12 December 2014; https://isgp-studies.com/jason-group-national-security-science
Lyncean link
At meeting #65 of the Lyncean Group in August 2011, the subject of our presentation was “Experience with the JASONs.” See more at the following link: https://lynceans.org/talk-65-82411/
2. The Naval Research Advisory Committee (NRAC)
NRAC was established by Congressional legislation in 1946 and provided science and technology advice to the Navy for the past 73 years. NRAC is the Navy counterpart to the Army Science Board and the Air Force Scientific Advisory Board. Background information on NRAC is available on the Office of naval Research (ONR) website at the following link: https://www.onr.navy.mil/About-ONR/History/nrac
On 5 April 2019, Steve Aftergood reported that, “This week the U.S. Navy abruptly terminated its own scientific advisory group, depriving the service of a source of internal critique and evaluation. Now it’s gone. The decision to disestablish the Committee was announced in a March 29 Federal Register notice.” The cancellation of the NRAC contract may be part of the apparent trend by federal agencies to limit independent scientific and technical advice. You can read this report on the FAS website here: https://fas.org/blogs/secrecy/2019/04/nrac-terminated/
3. Update 28 June 2019: NNSA issues new contract for JASON
In April 2019, the Department of Energy’s National Nuclear Security Administration (NNSA) issued a notice of intent (NOI) for a sole-source contract to provide funding for JASON through at least January 2020. You’ll find this NOI here: https://fas.org/irp/agency/dod/jason/nnsa-jason-noi.pdf
This article provides a good overview of the history of JASON and offers the following view on future funding for the group.
“What happens when Jason’s contract with NNSA expires in 2020 is unclear. One possibility is yet another home within DOD: This month, the U.S. House of Representatives added a line to DOD’s preliminary budget directing the Office of the Under Secretary of Defense for Acquisition and Sustainment to pick up Jason’s contract.”
4. Update 14 December 2019: DoD contract for JASON is in the 2020 DoD Budget
On 11 December 2019, Steve Aftergood reported that Congress, via the National Defense Authorization Act for 2020, has directed the Department of Defense to reach an “arrangement with the JASON scientific advisory group to conduct national security studies and analyses.” Aftergood identified the following specific JASON studies:
Performed in 2019: Nuclear weapon pit aging (NNSA), bio threats (DOE), and fundamental research security (NSF)
Planned for 2020: Assessments of electronic warfare programs, and options for replacing the W78 warhead currently carried by the Minuteman III intercontinental ballistic missile force
5. Update 12 May 2020: JASON COVID-19 pro bono study
On 11 May 2020, Jeffrey Mervis, writing for the Science.mag website, reported that JASON was engaged in a pro bono study, led by Massachusetts Institute of Technology (MIT) physicist Peter Fisher, of how to reopen university laboratories safely in the midst of the corona virus pandemic. The results of this JASON study are expected in June 2020 and should be a useful resource for university officials and government agencies that are now drafting their own policies on reopening.